+86-29-88857718






Устройство управления движением 7
Когда слышишь ?Устройство управления движением 7?, первое, что приходит в голову — очередная инкрементальная версия, шаг вперёд от шестого. Но в этом и кроется распространённый просчёт. На практике, переход с платформ 5-й или 6-й серии на седьмую — это часто смена парадигмы, а не просто апгрейд. Особенно когда речь заходит о встраивании в системы с жёсткими требованиями по надёжности и синхронизации, например, в прецизионном станкостроении или специализированном транспорте. Многие коллеги ожидают обратной совместимости ?из коробки?, а потом сталкиваются с тем, что драйверы старых энкодеров ведут себя нестабильно из-за нового алгоритма интерполяции в контроллере. Сам на этом обжёгся пару лет назад, пытаясь интегрировать УУД-7 в конвейерную линию, которая до этого работала на пятом поколении. Казалось бы, интерфейсы те же — CAN, EtherCAT, но нюансы в обработке прерываний и приоритетах шины заставили переписывать часть логики ПЛК. Именно поэтому сейчас, видя в спецификациях ?седьмая серия?, первым делом смотрю не на пиковую производительность, а на раздел, касающийся совместимости и миграции с предыдущих версий. Это экономит недели отладки.
От спецификации к реальной сборке: где кроются сложности
В документации на Устройство управления движением 7 обычно красуются идеальные кривые разгона-торможения и наносекундные времена отклика. Реальность начинается на этапе компоновки. Например, одна из ключевых фич седьмой серии — встроенный аппаратный ускоритель для прогнозирования траекторий. На бумаге это снижает нагрузку на центральный процессор. Но на деле его эффективность сильно зависит от качества и разрядности сигнала с датчиков обратной связи. Мы как-то взяли относительно недорогие резольверы, и этот самый ускоритель начал генерировать артефакты в расчётах, потому что шум в сигнале он интерпретировал как микроколебания вала. Пришлось ставить дополнительные фильтры на входных цепях, что увеличило задержку. Получился паритет: выиграли в одном, проиграли в другом. Это типичная ситуация, которую в даташитах не опишут.
Ещё один момент — тепловыделение. Контроллеры седьмого поколения, особенно в исполнении для многокоординатных систем, при полной нагрузке греются заметно сильнее предшественников. Стандартный алюминиевый радиатор из комплекта в плохо вентилируемом шкафу может не спасти. Помню проект для автоматизированного склада, где три таких устройства работали в тесной стойке. Через месяц наработки начались сбои по перегреву в самые жаркие часы дня. Решение оказалось простым — перейти на активное охлаждение и перераспределить кабельные трассы для лучшего обдува, но на поиск причины ушло время. Теперь всегда закладываю запас по тепловому режиму и настоятельно рекомендую клиентам делать то же самое.
Что касается поставщиков, то здесь рынок сильно сегментирован. Можно взять готовое решение от крупного игрока, но часто оно ?заточено? под их же сервоприводы и даёт скидку только в комплекте. Альтернатива — сборка системы из компонентов разных вендоров, что даёт гибкость, но требует глубокой настройки. В последнее время присматриваюсь к решениям от китайских производителей, которые активно развивают это направление. Например, у ООО Сиань Циюнь Чжисюнь Электронные Технологии в портфолио есть интересные интегральные схемы для управления движением, которые они позиционируют как основу для построения кастомных контроллеров. Их сайт (https://www.apexpcb-cn.ru) стоит изучить не только ради готовых модулей, но и ради понимания их подхода к проектированию печатных плат под высокочастотные сигналы — это критично для стабильной работы Устройства управления движением 7. Компания, основанная в 2018 году, судя по их описанию, делает ставку именно на инновации и создание экосистемы, что может быть выгодно для сложных проектов, где нужна тесная интеграция аппаратной и программной части.
Программная часть: прошивка и её ?особенности?
Аппаратура — это только половина дела. Прошивка для современных устройств управления — это огромный пласт работы. С седьмой серией многие производители перешли на более модульную архитектуру ПО, что, с одной стороны, удобно для кастомизации, с другой — создаёт риски. Обновление одного модуля (скажем, драйвера шагового двигателя) может неожиданно повлиять на работу модуля управления синхронными движками по EtherCAT. Сталкивался с багом, когда после такого обновления пропала плавность хода по одной из осей в контуре позиционирования. Логи не показывали ошибок, но на глаз и по тестам точности было видно ухудшение. В итоге пришлось откатываться на предыдущую сборку и ждать патча от вендора почти месяц.
Другая головная боль — инструменты для конфигурации. Некоторые производители предлагают супер-навороченные среды с графическим программированием, которые выглядят красиво в рекламе, но на практике оказываются медленными и громоздкими. Особенно когда нужно быстро внести точечное изменение в полевых условиях с ноутбука средней мощности. Иногда проще и надёжнее оказывается старый добрый текстовый конфигурационный файл, который можно отредактировать даже в простом редакторе. В этом плане некоторые решения, особенно от азиатских производителей, которые, как ООО Сиань Циюнь Чжисюнь Электронные Технологии, стремятся к интеграции технологий, иногда предлагают более прагматичный софт — без излишней графики, но с прямым доступом к регистрам и понятным API. Это может быть преимуществом для инженеров, которые хотят глубоко понимать, что происходит внутри системы.
Нельзя не упомянуть и вопросы безопасности. Современные Устройства управления движением 7 часто имеют сетевые интерфейсы для удалённого мониторинга и управления. И здесь встаёт вопрос о защите от несанкционированного доступа. По умолчанию на многих бюджетных или узкоспециализированных контроллерах эта защита либо минимальна, либо её настройка — тёмный лес. Приходится самостоятельно выстраивать политики на сетевом оборудовании или даже ставить дополнительные шлюзы. Это та область, которую часто упускают из виду на этапе проектирования, вспоминая о ней только при инцидентах.
Интеграция в существующие линии: история одного неудачного старта
Хочу поделиться конкретным случаем, который хорошо иллюстрирует подводные камни. Был заказ на модернизацию участка старой упаковочной линии. Задача — заменить морально устаревшие контроллеры на три новых Устройства управления движением 7. Линия работала на релейной логике и простых шаговиках, но клиент хотел добавить точного позиционирования и синхронизации с новым роботом-укладчиком. Казалось, идеальный кандидат для седьмой серии с её возможностями синхронного управления.
Сначала всё шло хорошо. Аппаратура встала на место, базовые функции заработали. Проблемы начались на этапе тонкой настройки. Старые шаговые двигатели, которые клиент не захотел менять ?пока работают?, имели нелинейный момент на низких скоростях. Алгоритмы компенсации в новом Устройстве управления были рассчитаны на более современные двигатели и не справлялись. Движения получались рывками. Пытались калибровать, подбирать коэффициенты — тратили дни. В итоге пришлось признать, что без замены приводов не обойтись. Проект ушёл в минус по времени и бюджету. Вывод, который сделал: перед внедрением такой сложной платформы необходимо проводить полный аудит всей механики и старых приводов. Современный контроллер — не волшебная палочка, он не исправит фундаментальные недостатки устаревшей периферии.
После этого случая выработал для себя правило: всегда настаивать на комплексном тесте ?железа? на стенде до начала монтажа на линии. Лучше потратить неделю на имитацию рабочих циклов в цеху, чем потом разбираться с последствиями в промышленной эксплуатации. Кстати, некоторые интеграторы, особенно те, кто, как группа компаний ООО Сиань Циюнь Чжисюнь Электронные Технологии, контролируют несколько предприятий по цепочке создания стоимости, могут предложить именно такой комплексный подход — от подбора компонентов до стендовых испытаний всей системы. Это ценно, когда нет времени или ресурсов на отладку всего самостоятельно.
Взгляд вперёд: что ждёт платформы управления
Если отвлечься от текущих проблем и посмотреть на тенденции, то Устройство управления движением 7 — это явный шаг в сторону большей интеллектуализации на краю сети (edge computing). Встроенные возможности для предварительной обработки данных телеметрии, простейшего машинного обучения для прогнозирования отказов — это уже не фантастика, а появляющиеся опции в топовых моделях. Правда, пока их реализация часто сыровата, и пользоваться этим — значит стать немножко бета-тестером.
Ещё один тренд — конвергенция. Границы между ПЛК, контроллером движения и промышленным компьютером размываются. Седьмая серия во многих исполнениях — это уже гибрид, способный выполнять и логику, и сложные расчёты траекторий. Это сокращает количество аппаратных единиц в шкафу, но повышает требования к надёжности и квалификации программиста, который должен разбираться и в дискретной логике, и в кинематике.
Что касается выбора, то мой совет — не гнаться за самой высокой цифрой в модели. ?Семёрка? — мощный инструмент, но для простых задач (скажем, управления несколькими независимыми шаговиками) может быть избыточной и неоправданно дорогой. Иногда лучшее решение — это проверенная пятая или шестая серия, но с правильно подобранной периферией и качественно написанным кодом. Главное — чётко понимать задачу, все её ограничения и возможные точки роста в будущем. И тогда уже подбирать аппаратную платформу, будь то продукт известного европейского бренда или решение на базе компонентов от активно развивающихся компаний вроде ООО Сиань Циюнь Чжисюнь Электронные Технологии, которые демонстрируют серьёзные амбиции в создании полной экосистемы для электроники.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 Услуги по разработке индивидуальных решений
Услуги по разработке индивидуальных решений -
 16T16R прототип программируемой РЛС
16T16R прототип программируемой РЛС -
 RTSD2502_250703
RTSD2502_250703 -
 Разработка программного обеспечения
Разработка программного обеспечения -
 256-канальная цифровая фазированная решётка NYL
256-канальная цифровая фазированная решётка NYL -
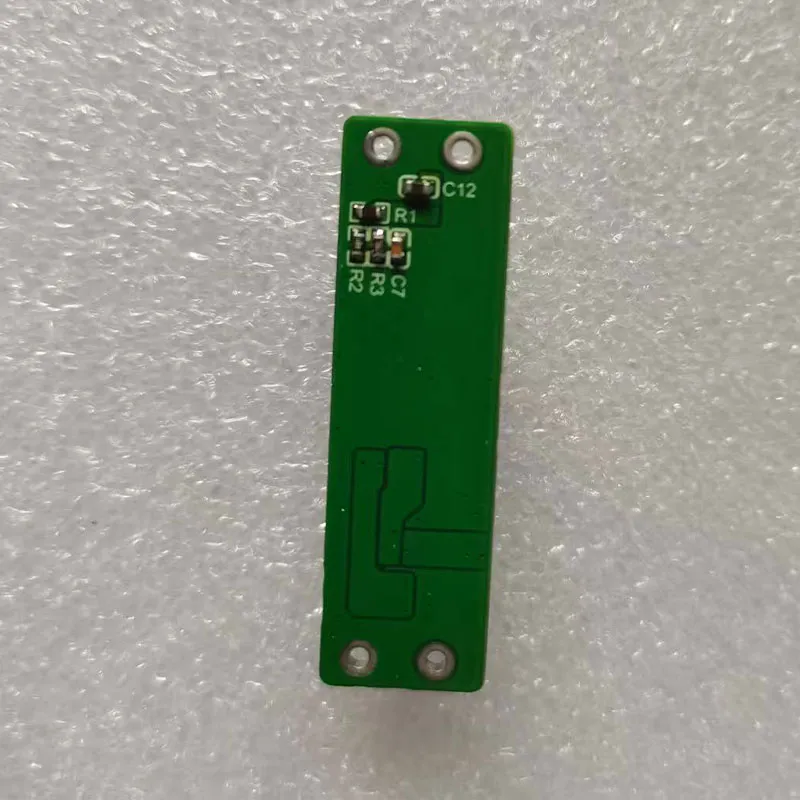 Плата защиты напряжения
Плата защиты напряжения -
 Высокоскоростной сбор и хранение данных: Прямая запись FPGA в NVMe SSD (двухдисковый отсек)
Высокоскоростной сбор и хранение данных: Прямая запись FPGA в NVMe SSD (двухдисковый отсек) -
 Высокоточный MEMS гироскоп WT-M317
Высокоточный MEMS гироскоп WT-M317 -
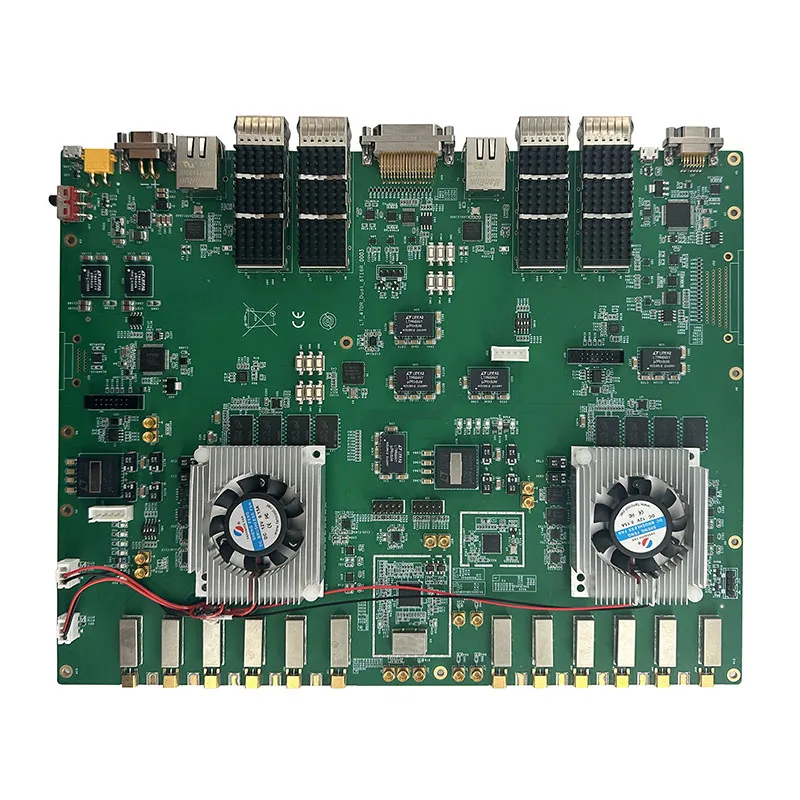 47DR_DUAL_6T16
47DR_DUAL_6T16 -
 PCB-проектирование и структурный дизайн
PCB-проектирование и структурный дизайн -
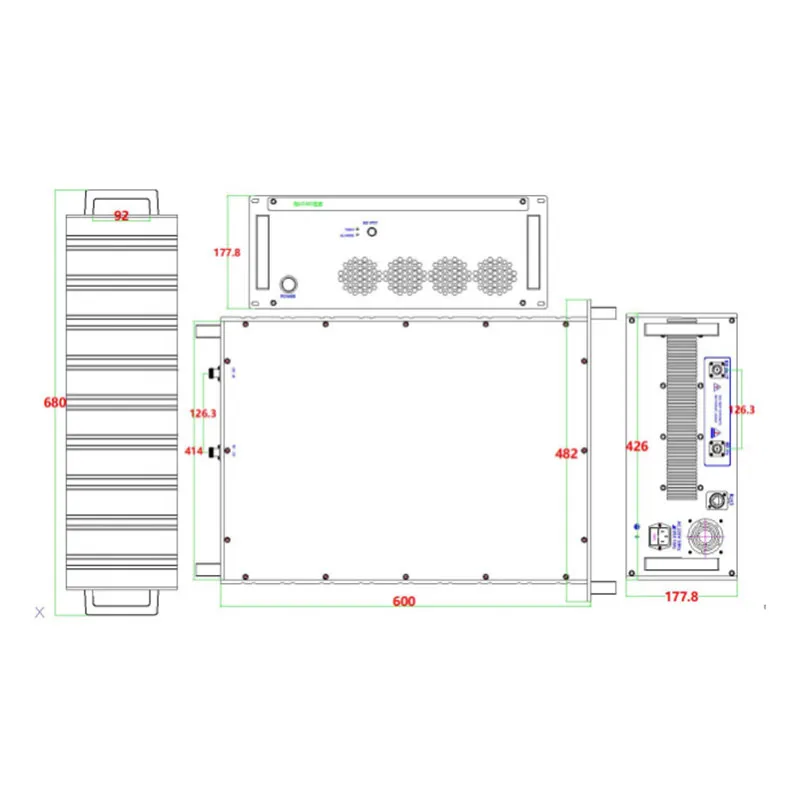 Усилитель мощности PA160-220MHz-500W
Усилитель мощности PA160-220MHz-500W -
 96-канальная цифровая фазированная решётка NLY-96DBF-V1.0
96-канальная цифровая фазированная решётка NLY-96DBF-V1.0