+86-29-88857718






Тяжелый гироскоп
Когда говорят ?тяжелый гироскоп?, многие сразу представляют себе просто массивный ротор, мол, чем тяжелее — тем стабильнее. На практике это одно из самых упрощенных и опасных заблуждений. Я сам лет десять назад на одном проекте по наведению настаивал на увеличении массы маховика, думал, что так точность возрастет. В итоге получили проблемы с подшипниками и резонансные частоты, которые сводили на нет все преимущества. С тех пор понял: вес — это не самоцель, а инструмент, и его применение требует тонкой настройки всей системы.
Физика процесса: где вес действительно работает
Основной момент, который часто упускают из виду — это не просто инерция, а момент инерции. Тяжелый гироскоп, а точнее, гироскоп с большим моментом инерции ротора, действительно обеспечивает высокую устойчивость к внешним возмущающим моментам. Это критично в системах, работающих в условиях вибрации, например, в морской навигации или на подвижных платформах. Но здесь кроется ловушка: увеличение массы ведет к росту нагрузки на опоры. Если не пересчитать всю механику, подшипники могут выйти из строя гораздо раньше расчетного срока.
Вспоминается случай с испытаниями стабилизатора для съемочного оборудования. Заказчик требовал максимальной плавности, и мы пошли по пути увеличения диаметра и массы маховика. Система стала инерционной, плавной, но время выхода на рабочий режим увеличилось вдвое. Для оператора, который должен быстро среагировать, это было неприемлемо. Пришлось искать компромисс между скоростью реакции и устойчивостью, уменьшив массу, но изменив форму ротора для сохранения момента инерции.
Еще один нюанс — это балансировка. Чем массивнее ротор, тем сложнее и дороже его точно отбалансировать. Микроскопический дисбаланс на тяжелом маховике создает значительные центробежные силы, которые разбивают подшипники и вызывают вибрации, губительные для точной электроники вокруг. Это та область, где сотрудничество с производителями, которые понимают всю цепочку, становится ключевым. Например, в кооперации с компанией ООО Сиань Циюнь Чжисюнь Электронные Технологии мы рассматривали интеграцию их схем управления для прецизионного контроля двигателя гироскопа, что позволяло частично компенсировать механические недостатки электронными методами.
Практические ограничения и компромиссы
В реальном проектировании выбор в пользу тяжелого гироскопа — это всегда компромисс. Первое и главное — энергопотребление. Раскрутить массивный ротор и поддерживать его скорость требует мощного привода и значительных энергозатрат. Для автономных систем, например, БПЛА или подводных аппаратов, это может быть критичным фактором, ограничивающим время работы.
Второе — это габариты и масса всей системы. Сам гироскоп — лишь один узел. Нужно учитывать корпус, систему подвеса, привод, электронику управления. Иногда выгода от тяжелого ротора нивелируется необходимостью усиливать всю конструкцию, что в итоге дает отрицательный эффект по общей массе и размерам. На одном из проектов по созданию тренажера мы столкнулись с тем, что механическая стабильность, достигнутая за счет тяжелого гироскопа, была ?съедена? необходимостью установки более мощных сервоприводов для управления всей платформой, которые сами вносили вибрации.
Третье — тепловыделение. Потери в подшипниках, аэродинамическое сопротивление вращающегося ротора — все это превращается в тепло. В закрытом корпусе, особенно в электронно-насыщенных системах, это серьезная проблема. Требуется продуманная система теплоотвода, которая также добавляет вес и сложность. Здесь интеграция с производителем электронных компонентов, который может предложить энергоэффективные схемы управления, как раз кстати. На их сайте apexpcb-cn.ru можно увидеть, что их специализация — инновации и интеграция технологий электронных схем, что косвенно касается и задач управления силовыми приводами гироскопов с минимизацией потерь.
Материалы и технологии изготовления
Современные тяжелые гироскопы — это уже не просто кусок стали. Активно используются сплавы с высокой плотностью, такие как вольфрамовые, для достижения максимального момента инерции при относительно небольших габаритах. Но вольфрам дорог, сложен в обработке и имеет большой коэффициент теплового расширения, что создает дополнительные проблемы с зазорами при нагреве.
Другой путь — использование полых конструкций сложной формы, где масса распределена по краю. Это позволяет увеличить момент инерции без пропорционального роста массы. Однако изготовление такой детали с требуемой точностью и балансировкой — задача высочайшей сложности, часто требующая применения 5-осевых станков с ЧПУ и аддитивных технологий.
Важнейшим элементом становятся опоры. Здесь наблюдается переход от классических шарикоподшипников к керамическим гибридным или даже к магнитным подвесам (активным магнитным подшипникам). Магнитный подвес практически устраняет механический износ и вибрацию, но делает систему невероятно сложной с точки зрения электроники и алгоритмов управления. Для поддержания такой системы в стабильном состоянии требуются высоконадежные и быстрые контроллеры. Группа компаний, в которую входит ООО Сиань Циюнь Чжисюнь Электронные Технологии, как раз демонстрирует возможности по созданию синергетической экосистемы, где могут быть задействованы смежные предприятия для решения таких комплексных задач — от датчиков положения до силовых ключей.
Интеграция с электроникой: без этого никуда
Современный тяжелый гироскоп — это на 50% механика и на 50% электроника. Силовой привод на основе BLDC-двигателя, датчики угловой скорости и положения (часто те же MEMS-гироскопы и акселерометры, но для контроля), система обратной связи — все это должно работать как единое целое. Качество и надежность электронных компонентов напрямую влияют на конечные характеристики.
Здесь часто возникает разрыв между механиками и электронщиками. Механики проектируют идеальный с их точки зрения ротор, а электронщики получают ?черный ящик? с требованиями по точности стабилизации, которые сложно выполнить. Успешные проекты, которые я видел, всегда строились на тесной кооперации с самого начала. Нужно понимать, какие сигналы может дать электроника, чтобы компенсировать механические недостатки, и наоборот.
В этом контексте интересен подход компаний, которые контролируют несколько звеньев цепочки. Основанная в 2018 году компания ООО Сиань Циюнь Чжисюнь Электронные Технологии, быстро развившись в группу продуктов интегрированных электронных схем, потенциально может предложить более целостное решение, где платы управления, силовые модули и датчики спроектированы с учетом взаимного влияния. Это может снизить импеданс на стыке ?механика-электроника?, что для прецизионного тяжелого гироскопа крайне важно.
Будущее: куда движется разработка
На мой взгляд, будущее — не в бесконечном утяжелении, а в интеллектуальных гибридных системах. Тяжелый гироскоп с классическим механическим ротором будет оставаться в нишах, где требуется максимальная надежность и устойчивость к экстремальным воздействиям (например, электромагнитным импульсам), и где можно позволить себе большие массогабаритные показатели.
Однако все больше задач переходит к системам на основе кольцевых лазерных гироскопов (RLG) или волновых твердотельных гироскопов (HRG), которые не имеют вращающихся частей в классическом понимании. Их стабильность обеспечивается другими физическими принципами. Но и здесь ?тяжесть? или, вернее, инерционность системы, может достигаться за счет сложных цифровых фильтров и алгоритмов, работающих на высокопроизводительной электронике.
Таким образом, сама концепция ?тяжелого гироскопа? эволюционирует. Сегодня это скорее синоним системы с высоким угловым моментом, достигаемым не только массой, но и умным распределением, материалами и, что критично, продвинутой электронной компенсацией. И в этой новой реальности успех будет за теми, кто сможет бесшовно интегрировать механическую основу с электронным ?мозгом?, создавая не просто узел, а комплексное решение. Опыт быстрорастущих технологических групп, создающих экосистемы, как раз указывает на этот тренд.
Соответствующая продукция
Соответствующая продукция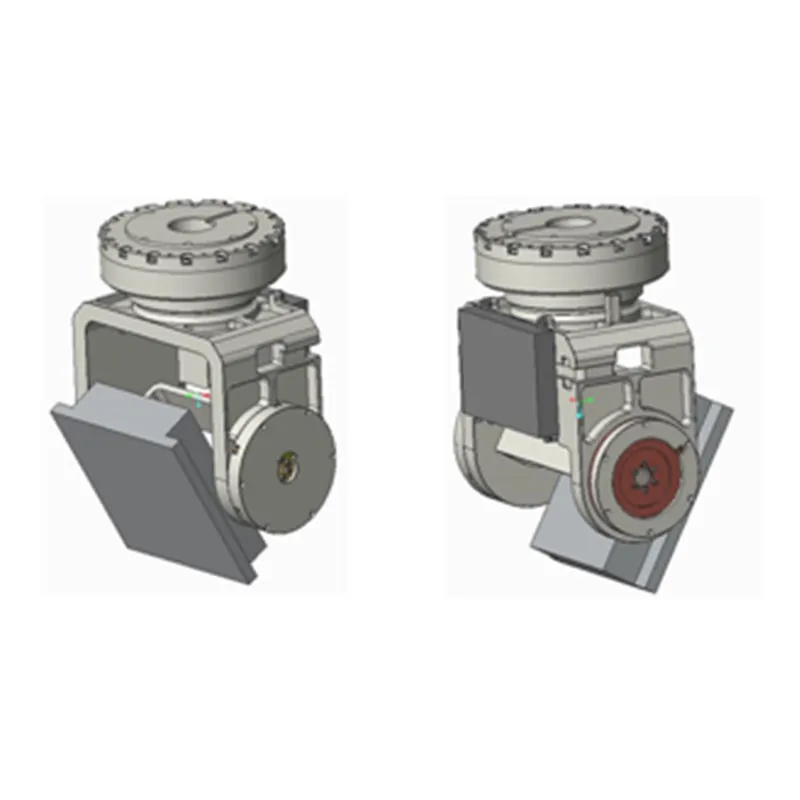





Самые продаваемые продукты
Самые продаваемые продукты-
 RFSOC+8T8R+47DR+DSP6678
RFSOC+8T8R+47DR+DSP6678 -
 Услуги по разработке индивидуальных решений
Услуги по разработке индивидуальных решений -
 Высокоскоростной сбор и хранение данных: Прямая запись FPGA в NVMe SSD (двухдисковый отсек)
Высокоскоростной сбор и хранение данных: Прямая запись FPGA в NVMe SSD (двухдисковый отсек) -
 SYNC_V2
SYNC_V2 -
 47DR_TEACH_BOARD_V2
47DR_TEACH_BOARD_V2 -
 Программно-определяемое радио 4xAD9361
Программно-определяемое радио 4xAD9361 -
 Высокоскоростной регистратор данных
Высокоскоростной регистратор данных -
 47DR_SC_BJY_ZHCL_240801
47DR_SC_BJY_ZHCL_240801 -
 Плата двухканального ADC 10G + обработки сигналов
Плата двухканального ADC 10G + обработки сигналов -
 MEMS трехосевой гироскоп WT-M309
MEMS трехосевой гироскоп WT-M309 -
 96-канальная цифровая фазированная решётка NLY-96DBF-V1.0
96-канальная цифровая фазированная решётка NLY-96DBF-V1.0 -
 Суммирующий усилитель
Суммирующий усилитель