+86-29-88857718






Программно-определяемая рлс
Когда говорят о программно-определяемых радиолокационных системах, многие сразу представляют себе некий универсальный ?черный ящик?, который можно перенастроить под любую задачу простым обновлением ПО. На практике же всё упирается в железо, в ту самую аппаратную платформу, от которой зависит, сможет ли ваша красивая математическая модель обработки сигналов вообще работать в реальном времени. Вот здесь и начинается самое интересное, а часто и самое сложное.
Где заканчивается софт и начинается реальность железа
Основная иллюзия — будто ?программная? часть означает полную независимость от аппаратуры. Это не так. Да, вы можете менять алгоритмы обработки, типы зондирующих сигналов, но базовая полоса, динамический диапазон приемника, скорость АЦП, мощность и чистота передатчика — это задается ?железом? раз и навсегда. Или нет? Современные ПЛИС, особенно от Xilinx (серия Ultrascale+ RFSoC) или Intel (Agilex), стирают эту границу. Они позволяют программно перераспределять ресурсы между цифровой обработкой и даже аналоговыми фронтендами в некоторых пределах. Но ключевое слово — ?в пределах?. Если ваша плата изначально не рассчитана на нужный вам частотный диапазон или не имеет достаточного количества каналов, никакое ПО не поможет.
Здесь я часто сталкиваюсь с проблемой выбора или разработки платформы. Нельзя просто взять готовую SDR-плату для коммуникаций и сделать из нее РЛС. Требования к фазовой стабильности каналов, к синхронизации, к уровню паразитных излучений — на порядки выше. Мы как-то пробовали адаптировать платформу от одного известного производителя SDR для задач пассивной локации. Идея была в экономии времени. Но в итоге ушли месяцы на борьбу с фазовыми шумами гетеродинов и перекрестными помехами между каналами, которые в описании продукта были ?в пределах спецификации?, но для наших целей оказались неприемлемы. Пришлось проектировать свою плату с нуля, заточив ее именно под наши алгоритмы.
В этом контексте интересен опыт компаний, которые специализируются на комплексных электронных решениях. Например, ООО Сиань Циюнь Чжисюнь Электронные Технологии, которая, судя по информации с их сайта apexpcb-cn.ru, развивается как группа продуктов интегрированных электронных схем. Такая интеграция — ключ к успеху. Разработка программно-определяемой рлс — это не только написание кода для ПЛИС или GPU. Это создание синергетической экосистемы, где проектирование печатных плат (видимо, их основной компетенции), поставка компонентов, разработка встроенного ПО и системной архитектуры тесно связаны. Управление несколькими предприятиями в рамках одной группы, как указано в их описании, как раз позволяет контролировать всю цепочку — от элементной базы до финального продукта. Для заказчика это снижает риски и сроки, когда один подрядчик отвечает за аппаратную часть, ее изготовление и базовое программное обеспечение.
Архитектура: централизация против распределенности
Следующий большой вопрос — архитектура системы. Классический подход — мощный центральный вычислитель (серверная стойка с GPU), к которому по высокоскоростным линиям связи (например, Ethernet 10/100Gb) подключены удаленные приемо-передающие модули. Это дает гибкость и легкость в обновлении алгоритмов. Но добавляет задержки, сложности синхронизации и уязвимость каналов связи. Для стационарных РЛС ПВО — может подойти. Для мобильной платформы, например, БПЛА или автомобиля, — уже проблема.
Альтернатива — распределенная интеллектуальная архитектура. Каждый приемо-передающий модуль (апертурный модуль) оснащен своей ПЛИС, которая выполняет предварительную обработку сигнала (фильтрацию, цифровое формирование луча, возможно, первичное обнаружение). На центральный узел передаются уже сжатые метаданные или треки. Это снижает требования к пропускной способности шины данных и повышает отказоустойчивость. Но резко усложняет разработку и отладку, так как нужно поддерживать согласованную работу десятков независимых вычислительных узлов.
Мы шли по второму пути в одном проекте бортовой РЛС с фазированной решеткой. И столкнулись с адской проблемой калибровки и юстировки каналов в полевых условиях. Программная часть должна была компенсировать разброс параметров усилителей, фазовращателей и даже температурные дрейфы. В теории алгоритмы есть. На практике — сбор калибровочных данных для сотни каналов занимал часы, а их актуальность терялась при изменении температуры окружающей среды. Пришлось внедрять систему онлайн-калибровки по встроенному референсному сигналу, что снова увеличило сложность аппаратной части. Получился замкнутый круг: хотели упростить систему за счет ?программной? гибкости, но для реализации этой гибкости потребовалось усложнить ?железо?.
Проблема интерфейсов и стандартизации
Одна из самых недооцененных тем в контексте программно-определяемой рлс — это интерфейсы. Как ваш софт общается с железом? Универсального стандарта де-факто нет. Кто-то использует собственные протоколы поверх PCIe, кто-то — модифицированный Ethernet (например, с временными метками PTP), кто-то — специализированные шины типа Serial RapidIO (которая, впрочем, теряет популярность). Отсутствие стандарта убивает возможность быстрой замены или апгрейда компонентов от разных производителей. Вы оказываетесь привязаны к одному вендору на весь жизненный цикок системы.
Здесь видится потенциал для компаний-интеграторов, таких как ООО Сиань Циюнь Чжисюнь Электронные Технологии. Если группа контролирует предприятия по всей цепочке, она может внутри своей экосистемы выработать единые стандарты интерфейсов и протоколов. Это даст на выходе более связный и легко масштабируемый продукт. Например, можно создать линейку совместимых плат формирования и приема сигналов, цифровых процессорных модулей на разной элементной базе (от бюджетных до высокопроизводительных), которые будут стыковаться между собой по единому правилу. Для заказчика это означает возможность начать с малого и наращивать функционал, докупая и добавляя модули, а не переделывая систему с нуля.
На своем опыте: мы разработали драйвер и API для нашей платы на базе Zynq RFSoC. Потратили на это полгода. И когда потребовалось перейти на более новую версию ПЛИС от того же производителя, оказалось, что изменения в аппаратной логике (IP-ядра) потребовали переписать почти 30% драйверов. Несовместимость на низком уровне свела на нет всю идею программной абстракции. Стандартизация внутри линейки продуктов могла бы этого избежать.
От алгоритмов к тактике: что действительно определяет программность?
Часто дискуссия уходит в область математики: алгоритмы БПФ, адаптивная фильтрация, пространственно-временная обработка. Это важно, но это лишь инструмент. Истинная ?программная определяемость? проявляется на более высоком уровне — уровне тактического применения. Может ли одна и та же аппаратная платформа быть сегодня РЛС обзора воздушного пространства, завтра — радаром для контроля морской поверхности, а послезавтра — средством радиоэлектронной разведки? Или, что более реалистично, совмещать эти функции в квазиреальном времени?
Здесь в игру входит управление ресурсами. Аппаратные ресурсы (мощность передатчика, время излучения, полоса частот, вычислительная мощность) конечны. Программный слой должен динамически распределять их между конкурирующими задачами в соответствии с приоритетами, заданными оператором или вышестоящей системой управления. Это уже не просто обработка сигнала, это задача реального времени, близкая к ОСРВ (ОС реального времени).
Мы реализовывали прототип такой системы для наземного поста. Было три основные задачи: обнаружение низколетящих БПЛА (высокий приоритет, быстрая круговая развертка), сопровождение выбранных целей (средний приоритет, требуется высокая точность по дальности) и пассивный анализ радиочастотной обстановки (фоновый режим, низкий приоритет). Самым сложным оказалось не написать каждый алгоритм по отдельности, а заставить их мирно сосуществовать, не ?голодая? и не создавая взаимных помех. Пришлось разрабатывать собственный планировщик задач, который учитывал не только вычислительную нагрузку на ПЛИС и CPU, но и энергопотребление, тепловыделение, а также временные ограничения на формирование луча антенной решеткой. В итоге, ?программная определяемость? свелась к сложнейшей задаче оптимального планирования в условиях неопределенности.
Экономика и будущее: почему это не для всех проектов
В заключение хочется развеять еще один миф: что программно-определяемая рлс всегда дешевле и быстрее в разработке. Для единичного изделия или малой серии — это абсолютно не так. Затраты на разработку сложнейшего ПО, отладку его взаимодействия с аппаратурой, создание инструментов для тестирования и калибровки могут многократно превысить стоимость ?железа?. Экономический смысл появляется при крупносерийном производстве или при создании платформы, на базе которой будет делаться семейство продуктов для разных заказчиков.
Именно поэтому бизнес-модель, ориентированная на создание экосистемы и управление промышленной цепочкой, как у упомянутой компании, выглядит стратегически верной. Контроль над несколькими предприятиями позволяет оптимизировать издержки на каждом этапе — от проектирования печатных плат до сборки и программирования. Это снижает порог входа для заказчиков, которым нужна не уникальная разработка ?с нуля?, а адаптация проверенной платформы под свои специфические требования.
Будущее, на мой взгляд, не за полностью универсальными системами ?всё в одном?, а за семействами совместимых аппаратных платформ с открытым (внутри экосистемы) программным API. Это позволит собирать РЛС, как конструктор, под конкретную задачу: вот модуль для Ku-диапазона, вот мощный процессорный блок, вот блок питания — соединяйте и настраивайте под свою задачу. И в этом процессе ключевую роль будут играть не столько производители чипов, сколько интеграторы, способные связать воедино железо, софт и потребности конечного пользователя. Программная определяемость — это в конечном счете не про радиотехнику, а про архитектуру и бизнес-модель.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 SYNC_V2
SYNC_V2 -
 47DR_4T4R_SCSZSF3
47DR_4T4R_SCSZSF3 -
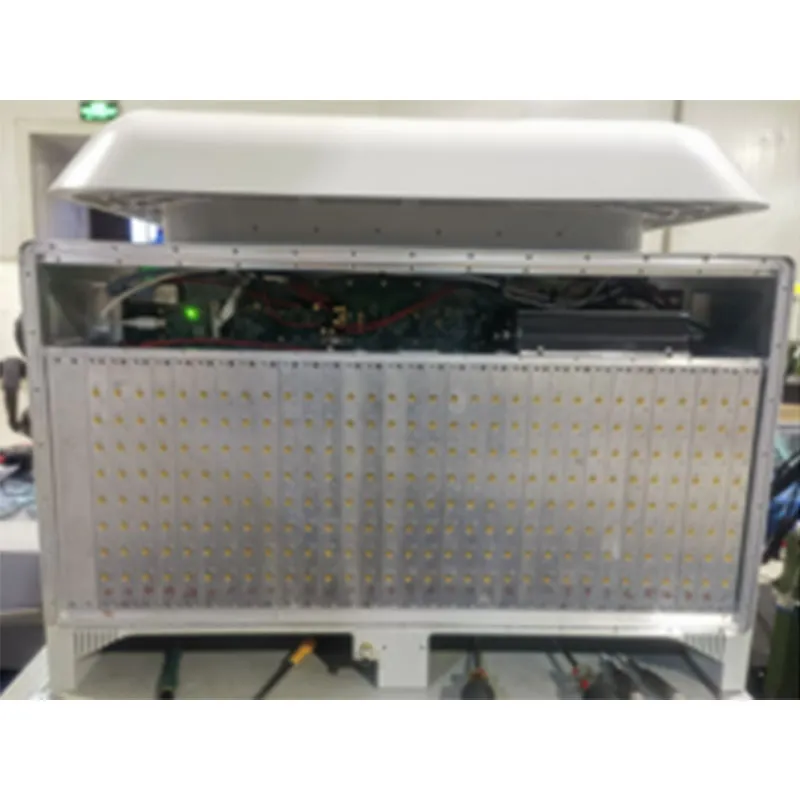 256-канальная цифровая фазированная решётка NYL
256-канальная цифровая фазированная решётка NYL -
 Плата высокоскоростной маршрутизации и коммутации данных VU13P
Плата высокоскоростной маршрутизации и коммутации данных VU13P -
 Оптоэлектронная гондола
Оптоэлектронная гондола -
 TC49DR-8T9R
TC49DR-8T9R -
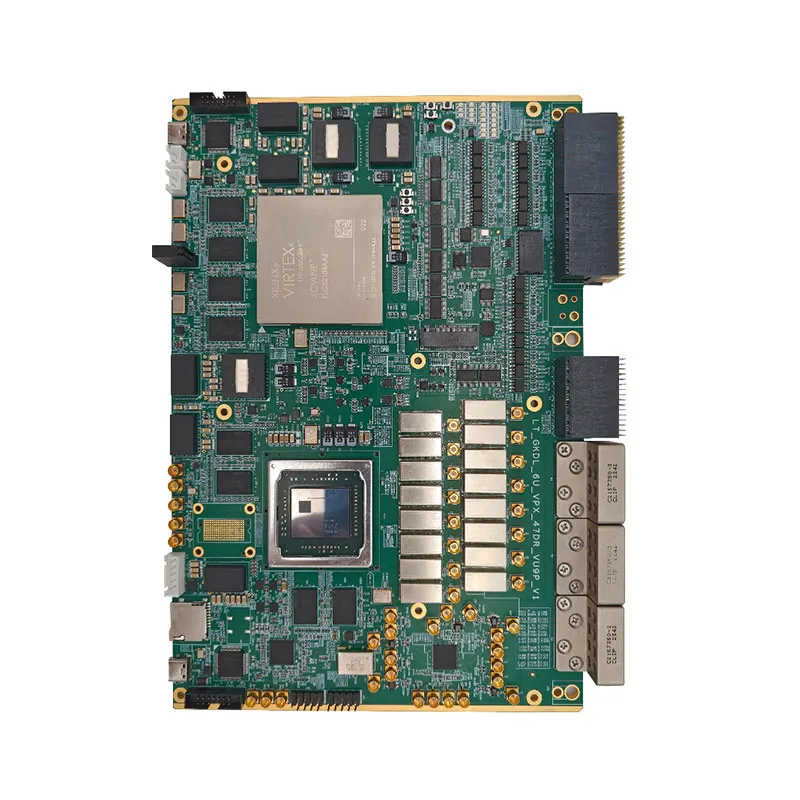 GKDL_6U_VPX_47DR_VU9P_V2
GKDL_6U_VPX_47DR_VU9P_V2 -
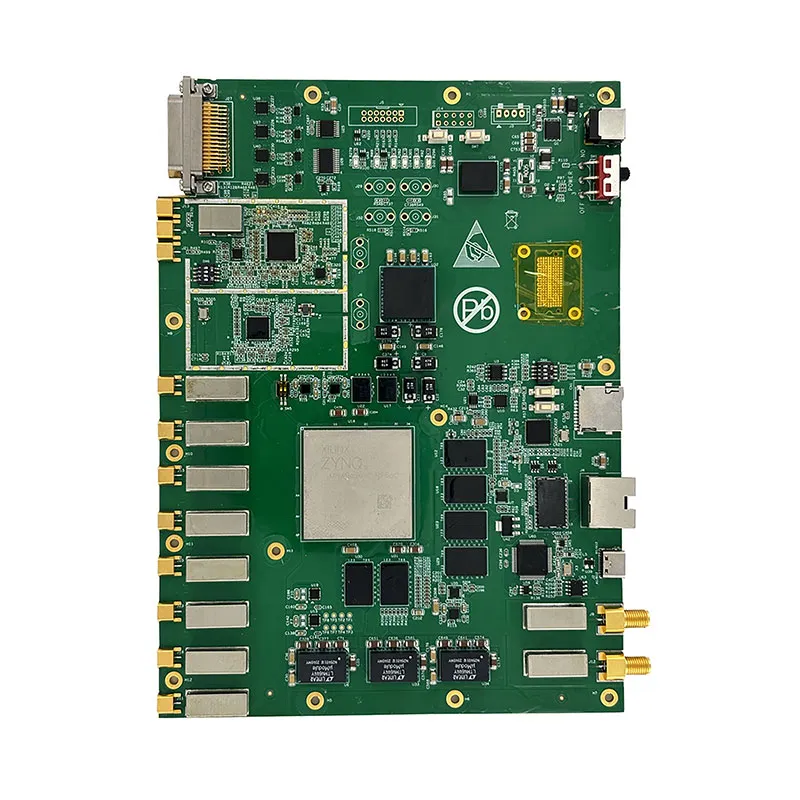 RFSoC-2T8R-47DR
RFSoC-2T8R-47DR -
 64-канальное программно-определяемое радио NLY-VNX-64DBF
64-канальное программно-определяемое радио NLY-VNX-64DBF -
 PAM Jump Host
PAM Jump Host -
 От печатной платы до готового продукта: комплексные решения для производства электроники
От печатной платы до готового продукта: комплексные решения для производства электроники -
 RTSD2502_250703
RTSD2502_250703