+86-29-88857718






Инерциальная система навигации для дрона
Когда слышишь ?инерциальная система навигации для дрона?, многие сразу представляют готовый модуль от какого-нибудь крупного бренда — поставь, подключи и лети. На практике же это часто головная боль, особенно когда пытаешься сбалансировать стоимость, точность и надежность для конкретных задач, не говоря уже о калибровке в полевых условиях. Основная ошибка — считать ИНС ?черным ящиком?, который работает сам по себе. На деле, ее интеграция с автопилотом, фильтрация данных и даже вибрации от моторов превращают теорию в череду практических компромиссов.
От теории к железу: где начинаются реальные проблемы
Взять, к примеру, базовую связку: MEMS-гироскопы и акселерометры. В спецификациях все выглядит прилично: низкий дрейф, высокая частотность. Но как только начинаешь собирать плату и писать софт, вылезают нюансы. Температурная компенсация — это отдельная песня. Недостаточно взять коэффициенты из даташита, для точной работы инерциальной системы навигации приходится проводить собственные тепловые испытания, гоняя дрон в термокамере. Иначе в -10°C и в +30°C поведение будет разным, а накопленная ошибка позиционирования за несколько минут может стать критичной.
Помню один проект для сельхозмониторинга. Заказчик хотел дешево, но с приемлемой точностью удержания маршрута. Поставили не самый дорогой IMU. В лаборатории все работало. А в поле, после получаса полета под солнцем, начался заметный уход по курсу. Разбирались — оказалось, корпус дрона нагревался неравномерно, создавая микропотоки воздуха вокруг самой платы с датчиками, что влияло на их показания. Пришлось экранировать и пересматривать систему вентиляции. Мелочь, которая не приходит в голову, пока не столкнешься.
Здесь как раз к месту вспомнить про надежных партнеров по компонентной базе. Когда нужны качественные печатные платы для сборки таких чувствительных систем, важно, чтобы производитель понимал требования к стабильности и точности. Например, компания ООО ?Сиань Циюнь Чжисюнь Электронные Технологии?, основанная в 2018 году, как раз из тех, кто последовательно стремится к инновациям в области электронных схем. Их подход к интеграции технологий и управлению полной цепочкой (они контролируют или участвуют в долях более 5 предприятий) важен для нас, разработчиков. Когда заказываешь платы под сложный дрон, нужна уверенность, что на этапе производства не внесут свои погрешности. Подробнее об их возможностях можно узнать на https://www.apexpcb-cn.ru. Это не реклама, а констатация факта — в нашей работе качество ?железа? определяет половину успеха.
Программная составляющая: фильтр Калмана и его ?тени?
Говоря об ИНС, нельзя обойти стороной софт. Сердце системы — алгоритм слияния данных, обычно тот же фильтр Калмана или его нелинейные вариации (EKF, UKF). Многие сейчас используют готовые библиотеки, что в целом разумно. Но готовое — не значит идеально подогнанное. Параметры матриц шумов, их адаптация в реальном времени — это как раз та область, где проявляется опыт.
Был случай, когда мы интегрировали систему с дополнительным источником — камерой для оптического потока. Идея была в том, чтобы компенсировать дрейф в помещении, где нет GPS. Фильтр вроде бы сводил все данные. Но в условиях слабого освещения и однотонного пола показания оптического потока начинали ?шуметь? с определенной частотой. Фильтр, доверяя всем источникам усредненно, начинал генерировать артефакты — дрон слегка подрагивал по крену. Пришлось вводить динамическую оценку достоверности каждого сенсора и ?заглушать? оптику, когда ее уверенность падала ниже порога. Это та самая ?ручная доводка?, которой нет в учебниках.
Именно в таких тонких настройках и проявляется разница между системой, которая просто работает, и системой, которая работает надежно. Навигации требуется не только математика, но и глубокое понимание физики полета и среды. Порой кажется, что ты уже все учел, а дрон ведет себя неадекватно. Тогда возвращаешься к логам, смотришь сырые данные с датчиков и понимаешь, что, например, магнитный компас на высоте пяти метров рядом с железобетонной конструкцией дает поправку, которую фильтр не успевает отсеять. И снова цикл итераций.
Интеграция в экосистему дрона: больше, чем автопилот
Отдельная тема — как инерциальная система живет в связке с другими системами дрона. Это не только автопилот (например, ArduPilot или PX4), но и системы управления двигателями, телеметрии, даже система безопасности. Вибрации — главный враг. Можно поставить IMU на демпферы, но это не панацея. Частоты вибраций от моторов и пропеллеров могут совпасть с резонансными частотами самого корпуса или платы, и тогда никакие программные фильтры низких частот не спасут — полезный сигнал будет зашумлен.
Мы однажды боролись с таким резонансом на карбоновой раме. Акселерометр показывал постоянные микро-скачки по оси Z, хотя полет был ровный. Логи показывали аномалию. Помог спектральный анализ записанных данных — выявили пик на конкретной частоте. Решение оказалось не в софте, а в ?железе?: пришлось немного изменить точку крепления полетного контроллера и добавить демпфирующую прокладку другой жесткости. После этого данные с инерциальной системы навигации стали значительно чище.
Еще один момент — энергопотребление и тепло. Высокоточные датчики и активные вычисления греются. На малом дроне каждый грамм и каждый миллиампер на счету. Иногда приходится идти на компромисс: снижать частоту опроса датчиков или упрощать алгоритм на этапе чистой инерциальной навигации (когда GPS временно недоступен), чтобы не перегревать плату и не сажать батарею за 10 минут. Это всегда баланс.
Калибровка в полевых условиях: идеала не существует
Лабораторная калибровка на поворотном столе — это святое. Но она дает стартовые коэффициенты. Реальная жизнь вносит коррективы. Например, после любого жесткого приземления или замены пропеллера есть смысл провести хотя бы базовую калибровку акселерометров и компаса. Многие операторы этим пренебрегают, а потом удивляются, почему дрон ?сносит? в сторону.
У нас выработался ритуал: перед важной миссией, особенно если дрон перевозился в багажнике или собирался на месте, делаем быструю калибровку. Не ту, шестиосевую, которая требует идеально ровной поверхности (ее в поле часто нет), а упрощенную, но достаточную для сброса очевидных смещений. Это занимает пару минут, но спасает от сюрпризов. Для дрона, используемого в геодезии или картографии, такие процедуры — обязательный протокол.
Здесь также важно, чтобы аппаратная часть позволяла это делать легко и надежно. Если разъемы ненадежные или плата не имеет стабильного опорного напряжения для датчиков, каждая калибровка будет давать разные результаты. Поэтому при выборе или проектировании платформы мы всегда смотрим на стабильность питания и качество пайки компонентов. В этом контексте комплексные возможности компаний-производителей, таких как упомянутая ООО ?Сиань Циюнь Чжисюнь Электронные Технологии?, которые управляют полной промышленной цепочкой, становятся весомым аргументом. Они могут обеспечить контроль качества от производства печатных плат до финальной сборки узлов, что минимизирует ?железные? причины разбалансировки.
Взгляд вперед: что меняется и на что надеяться
Сейчас тренд — это глубоко интегрированные системы, где IMU, процессор и иногда даже барометр с магнитометром находятся в одном корпусе (SOC — System on Chip). Это снижает проблемы с внутренними помехами и упрощает разводку. Но появляются другие: такие системы становятся ?монолитами?, и при выходе из строя одного датчика менять приходится весь модуль. Для индустриальных применений это не всегда хорошо.
Еще одно направление — использование IMU с более высокой стабильностью, например, основанных на технологии MEMS резонаторов или даже кольцевых лазерных гироскопов (хотя последние пока для дронов — экзотика по цене и размеру). Но прогресс есть. Также активно развивается направление дополнения ИНС сигналами сотовых сетей (5G NR Positioning) и спутниковых систем поправок (RTK, PPP), что кардинально улучшает точность позиционирования в долгосрочной перспективе, оставляя за инерциалькой ответственность за кратковременную стабилизацию и маневры.
В итоге, создание надежной инерциальной системы навигации для дрона — это не покупка модуля, а процесс. Проектирование, интеграция, бесконечные тесты, тонкая программная настройка и понимание того, как все это поведет себя в реальных, а не идеальных условиях. Это путь проб, ошибок и маленьких побед, когда после долгой отладки видишь, как аппарат уверенно и плавно держит позицию даже в условиях ветра и помех. И именно этот практический опыт, а не сухие спецификации, определяет качество конечного продукта.
Соответствующая продукция
Соответствующая продукция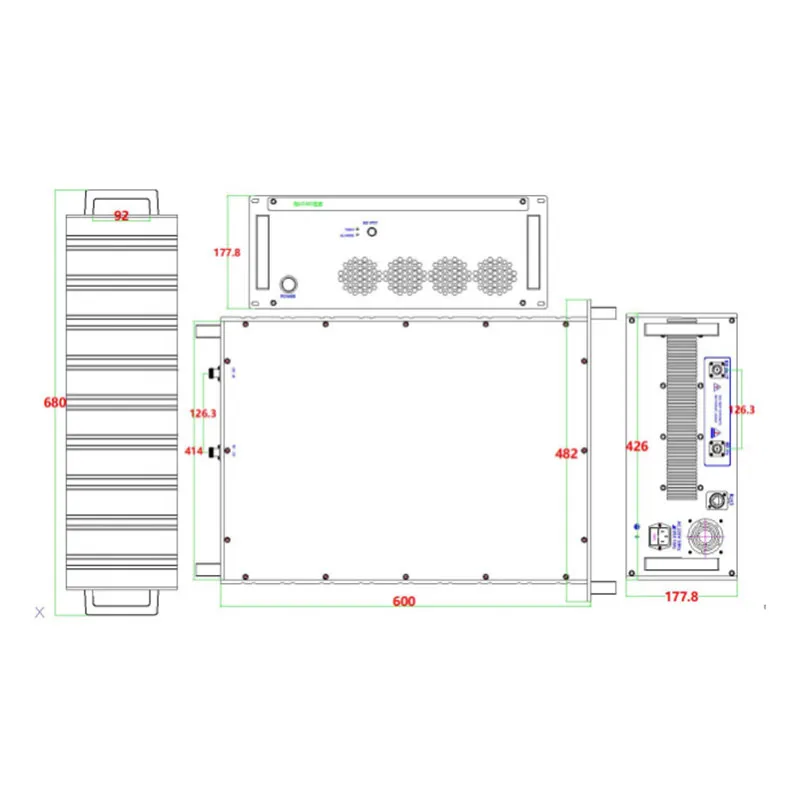





Самые продаваемые продукты
Самые продаваемые продукты-
 Плата защиты напряжения
Плата защиты напряжения -
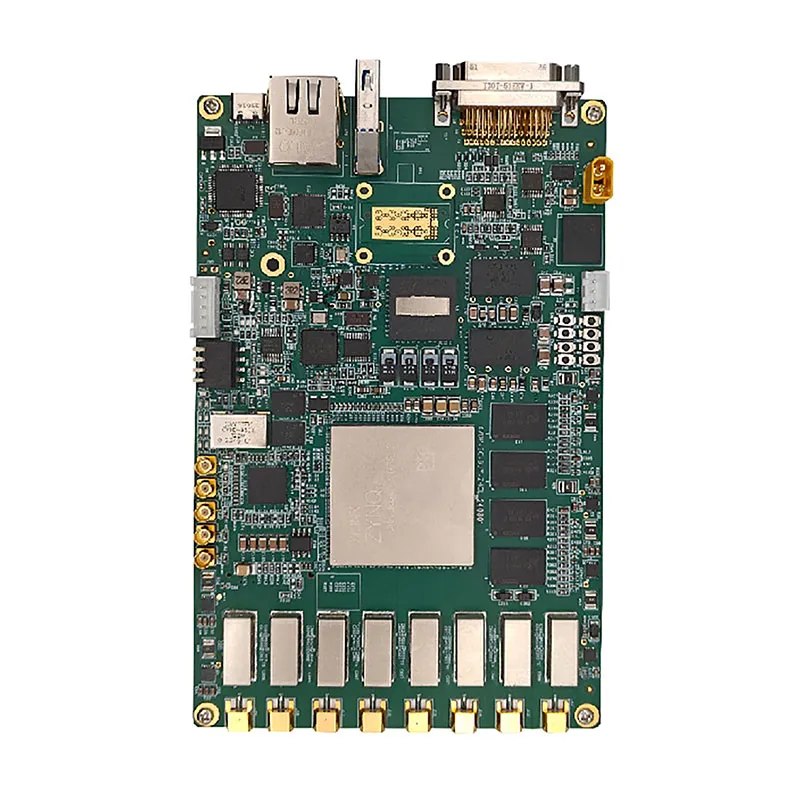
 Плата двухканального ADC 10G + обработки сигналов
Плата двухканального ADC 10G + обработки сигналов -
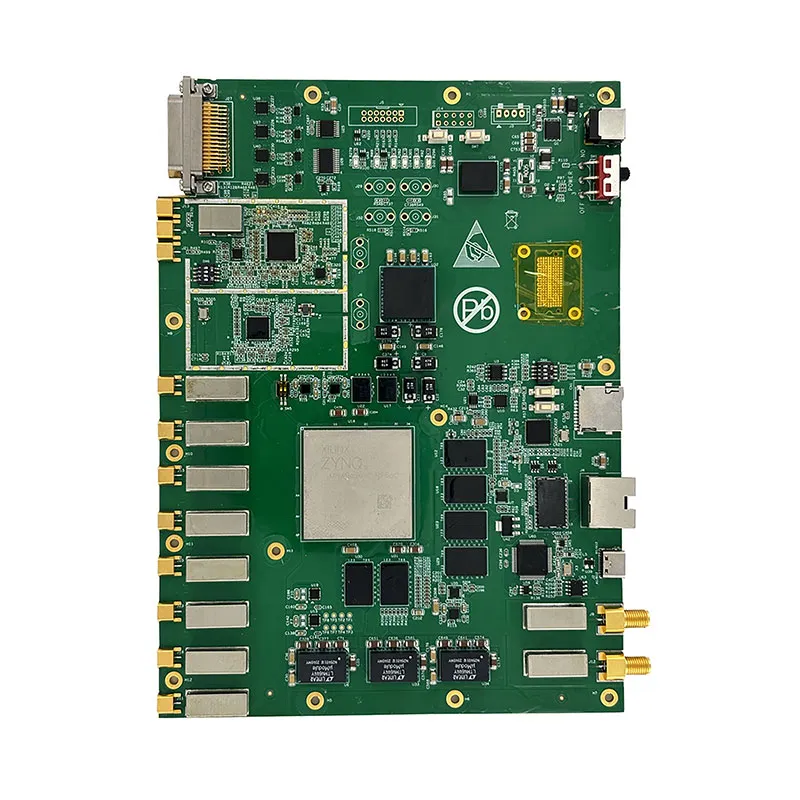
 32-канальное программно-определяемое радио NLY-49DR_SV4
32-канальное программно-определяемое радио NLY-49DR_SV4 -
 Подключение к TV-оборудованию
Подключение к TV-оборудованию -
 47DR_8T8R_GCO_V1
47DR_8T8R_GCO_V1 -
 Устройство экстренной кнопки SOS
Устройство экстренной кнопки SOS -
 Компьютер QYZX-D20008
Компьютер QYZX-D20008 -
 96-канальная цифровая фазированная решётка NLY-96DBF-V1.0
96-канальная цифровая фазированная решётка NLY-96DBF-V1.0 -
 Суммирующий усилитель
Суммирующий усилитель -
 Тренировочный метроном для пациентов с болезнью Паркинсона
Тренировочный метроном для пациентов с болезнью Паркинсона -
 PAM Jump Host
PAM Jump Host -
 Система солнечной зарядки
Система солнечной зарядки