+86-29-88857718






Гироскоп gg1380
Когда речь заходит о GG1380, многие сразу представляют себе некий универсальный и идеальный MEMS-гироскоп, но на практике всё оказывается куда интереснее и неоднозначнее. Часто встречаю в техзаданиях требование ?поставить GG1380?, будто это волшебная таблетка для любой системы стабилизации или навигации. На деле же, этот датчик — очень специфичный инструмент, и его применение без глубокого понимания физики процесса и особенностей конкретного применения ведёт либо к переплате, либо к невыполнению ТЗ. Сам через это проходил, когда пытался адаптировать его для одной задачи по высокоточному позиционированию манипулятора — получил кучу шума на выходе и только потом разобрался, в чём была загвоздка.
Что скрывается за маркировкой и типовыми характеристиками
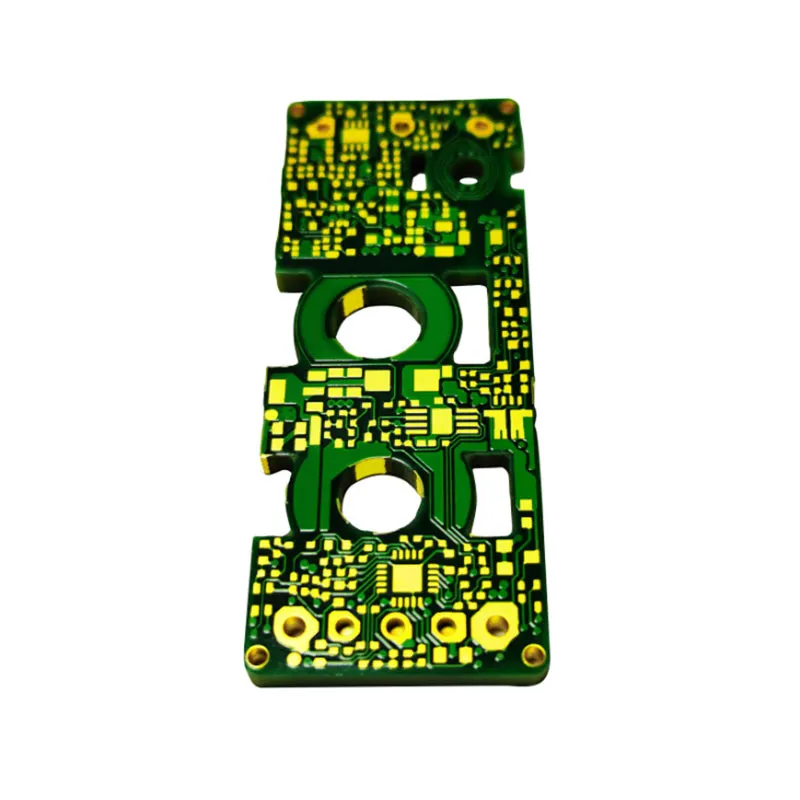
Если взять даташит, то основные параметры GG1380 выглядят привлекательно: низкое энергопотребление, цифровой интерфейс, заявленный низкий уровень шума. Но вот эта самая цифра шума — она ведь измеряется в идеальных лабораторных условиях. В реальном устройстве, на той же плате управления, которую мы, допустим, заказывали у ООО Сиань Циюнь Чжисюнь Электронные Технологии, картина меняется. Их специалисты как-то в переписке справедливо заметили, что итоговые шумовые характеристики на 30-40% зависят от качества разводки земли и аналоговой части питания на самой печатной плате. Это не упрёк, а важное наблюдение: сам по себе гироскоп GG1380 — лишь часть системы.
Ещё один нюанс, который часто упускают — температурная калибровка. В документации есть коэффициенты, но они усреднённые. В партии датчиков от одного и того же производителя разброс этих температурных зависимостей может быть таким, что для проекта, работающего в диапазоне от -40 до +85, придётся вводить индивидуальную калибровку для каждого экземпляра. Мы на одном проекте поначалу этого не учли, и система начинала ?плыть? после получаса работы в термокамере. Пришлось налаживать процедуру двухточечной калибровки на производстве.
И конечно, интерфейс. SPI хоть и стандартный, но временные диаграммы и требования к фронтам сигналов у GG1380 достаточно жёсткие. При использовании не самого быстрого микроконтроллера или при наличии длинных проводников на макете легко получить сбои в чтении данных, которые сначала выглядели как случайные выбросы. Долго искали причину, пока не подключили логический анализатор.
Опыт интеграции в реальные устройства и подводные камни
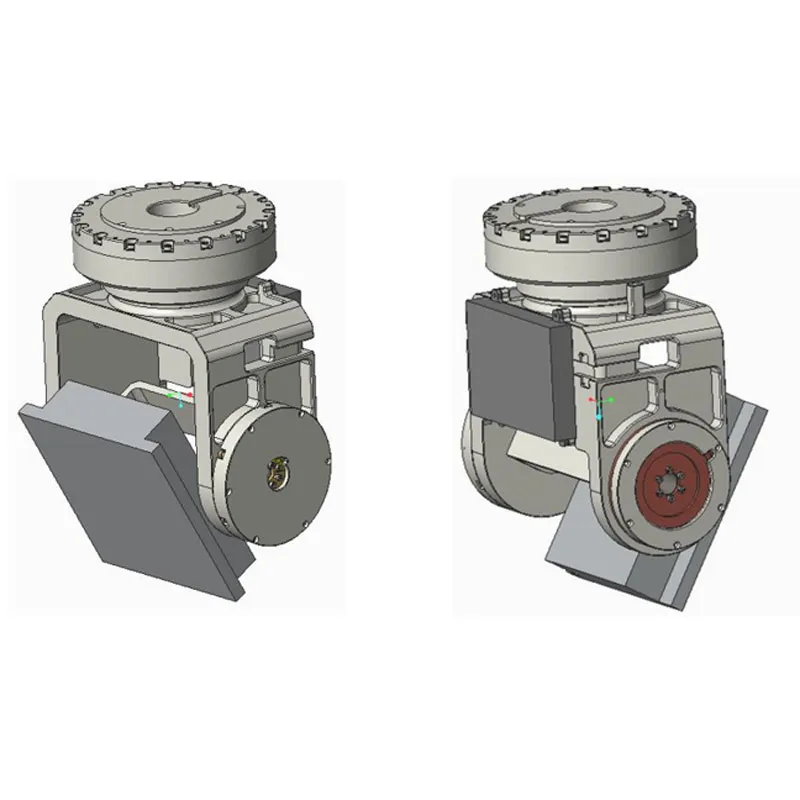
Один из самых показательных случаев был связан с интеграцией в стабилизированную платформу для видеонаблюдения. Заказчик хотел компактность и низкую цену, и GG1380 вроде бы подходил. Но не учли вибрации от собственного двигателя платформы. MEMS-гироскоп, включая GG1380, чувствителен не только к угловой скорости, но и к линейным ускорениям, особенно на определённых резонансных частотах. В итоге, на выходе был сигнал, в котором полезный поворот тонул в шумах от вибрации. Пришлось дорабатывать механическое крепление и вводить дополнительный цифровой фильтр нижних частот, что снизило быстродействие всей системы.
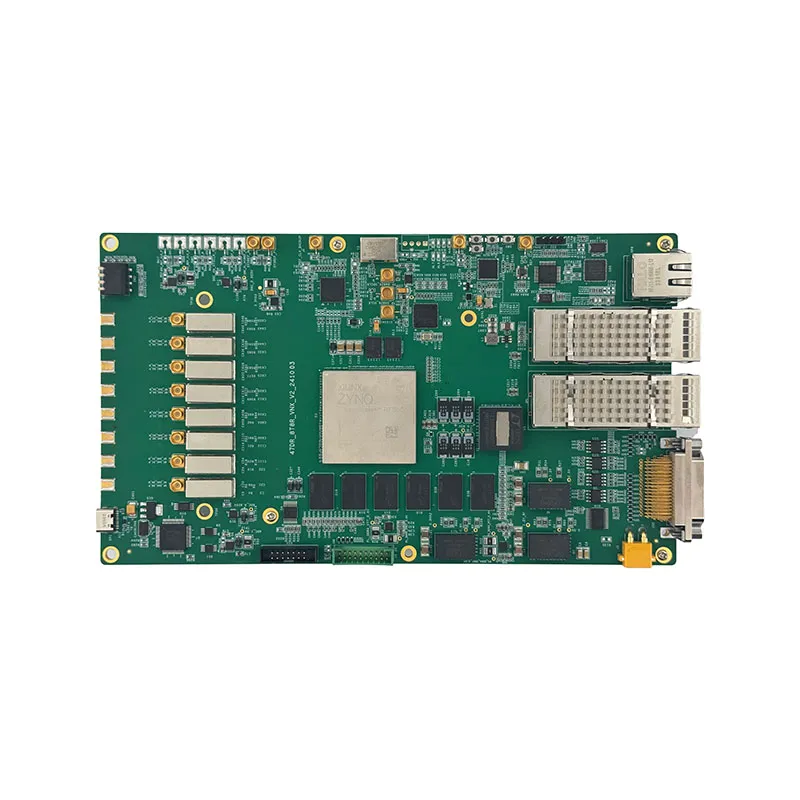
В этом контексте, кстати, важна роль партнёра по производству плат. Когда задача усложнилась и потребовалась многослойная плата с чётким разделением аналоговых и цифровых земель, обратились к ООО Сиань Циюнь Чжисюнь Электронные Технологии. Их профиль — инновации и интеграция технологий электронных схем — оказался как раз кстати. Не буду говорить, что они решили все проблемы, но их инженеры задали несколько правильных вопросов по развязке питания датчика, что в итоге помогло свести паразитные наводки к минимуму. Это тот случай, когда компетенции в области интеграции схем реально влияют на итоговые характеристики устройства.
Ещё один практический момент — работа в связке с акселерометром для формирования AHRS (системы ориентации). Алгоритмы слияния данных, типа фильтра Маджвика, критично зависят от синхронности прихода данных с гироскопа и акселерометра. В GG1380 есть встроенный FIFO-буфер, но его использование не всегда очевидно. Если считывать данные по прерыванию по готовности данных только с гироскопа, а акселерометр опрашивать в основном цикле, возникает временной сдвиг, который ?ломает? фильтр на динамических режимах. Пришлось переписывать драйвер, чтобы организовать единый источник данных по таймеру.
Вопросы надёжности и долговременной стабильности
Для промышленных применений важен не только начальный разброс параметров, но и их дрейф со временем. С GG1380 у меня накоплены данные с тестовых стендов, где несколько датчиков непрерывно работали больше года. Выводы неоднозначные. Смещение нуля (bias) у некоторых экземпляров оставалось в пределах заявленного в даташите, у других — медленно ползло. Это говорит о том, что для высоконадёжных систем одной установочной калибровки мало, нужна периодическая, хотя бы раз в несколько тысяч часов работы.
Также столкнулся с эффектом, который редко описывают в мануалах — зависимость от влажности. Устройство с GG1380, предназначенное для наружного применения, проходило испытания в климатической камере. При резких перепадах влажности и наличии даже микроскопических негерметичностей в корпусе самого датчика (не нашего устройства, а чипа!), наблюдались кратковременные всплески показаний. Производитель, когда с ним связались, подтвердил, что для серийного MEMS это в пределах нормы, но для нас это стало дополнительным фактором риска.
Здесь снова вспоминается важность экосистемы. Компания, которая не просто продаёт компоненты, а способна управлять цепочкой поставок и контролировать качество на разных этапах, как ООО Сиань Циюнь Чжисюнь Электронные Технологии со своей синергетической экосистемой промышленной цепочки, может быть более полезным партнёром. Они могут, например, помочь с организацией входного контроля партии датчиков или предложить альтернативную компонентную базу с лучшими параметрами по устойчивости к внешним факторам.
Когда GG1380 — правильный выбор, а когда стоит поискать альтернативу
Исходя из всего вышеперечисленного, у меня сложилась своя картина применения. GG1380 хорошо показывает себя в потребительской электронике, в дронах начального и среднего уровня, в интерактивных устройствах (типа пультов ДУ), где требования к абсолютной точности не запредельные, а важны стоимость, размер и энергопотребление. Его цифровой выход и относительно простой драйвер ускоряют разработку.
А вот для задач, где требуется высокая повторяемость, долговременная стабильность или работа в агрессивных средах, я бы уже смотрел в сторону других решений, возможно, даже не MEMS, а на волоконно-оптические или лазерные гироскопы, несмотря на их цену и габариты. Была задача для геодезического оборудования — там GG1380 даже не рассматривался, слишком велик дрейф.
Интересный компромиссный вариант — использование GG1380 в паре с внешней корректировкой, например, по GPS или по магнитному компасу. В таком связке его недостатки частично нивелируются. Мы реализовывали такую схему для автономной навигации роботизированной тележки внутри склада, где были периодические метки для коррекции. Работало устойчиво.
Выводы и субъективные впечатления
В итоге, гироскоп GG1380 — это не ?чёрный ящик?, который можно просто припаять и получать идеальные данные. Это инструмент, требующий понимания, аккуратного обращения и, часто, дополнительной инженерной работы по калибровке и фильтрации. Его успешное применение — это всегда история о грамотной интеграции, а не о волшебных свойствах самого чипа.
Сотрудничество с технологическими партнёрами, которые глубоко погружены в тему интеграции электронных схем, как упомянутая компания, может существенно сократить путь от макета к серийному изделию. Их взгляд со стороны на разводку платы и компоновку часто помогает избежать глупых ошибок, которые потом дорого исправлять.
Лично для меня GG1380 остаётся рабочим инструментом в определённом сегменте проектов. К нему нет какого-то пиетета, но и демонизировать его не стоит. Просто нужно чётко знать его сильные стороны (цена, размер, интерфейс) и слабые (дрейфы, чувствительность к внешним воздействиям). И тогда его применение будет оправданным и эффективным. Всё остальное — уже задача инженера, который этот датчик применяет.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Подключение к TV-оборудованию
Подключение к TV-оборудованию -
 Производство и обработка PCB и SMT
Производство и обработка PCB и SMT -
 Программно-определяемое радио 4xAD9361
Программно-определяемое радио 4xAD9361 -
 49DR_SV3
49DR_SV3 -
 96-канальная цифровая фазированная решётка NLY-96DBF-V1.0
96-канальная цифровая фазированная решётка NLY-96DBF-V1.0 -
 Обучение разработке на ПЛИС (FPGA)
Обучение разработке на ПЛИС (FPGA) -
 TC49DR-8T9R
TC49DR-8T9R -
 MEMS инерциальная навигационная система WT-INS-B01
MEMS инерциальная навигационная система WT-INS-B01 -
 47DR-4T8R_LBV
47DR-4T8R_LBV -
 Плата обработки и сбора базовых сигналов RTSD2501
Плата обработки и сбора базовых сигналов RTSD2501 -
 47DR_8T8R_VNX_V2
47DR_8T8R_VNX_V2 -
 Двухпроцессорный сервер 3C5000
Двухпроцессорный сервер 3C5000