+86-29-88857718






Гироскоп стендов
Если говорить о гироскоп стендов, многие сразу представляют себе идеально чистую лабораторию, цифры на экране и безупречный протокол испытаний. Но на практике всё часто упирается в вентиляцию цеха, температуру в помещении и даже в то, как давно меняли фильтры в системе. Это не просто стенд — это целая экосистема, где мелочи вроде вибрации от компрессора или наводок от силового кабеля могут свести на нет все теоретические расчёты.
Что на самом деле скрывается за термином
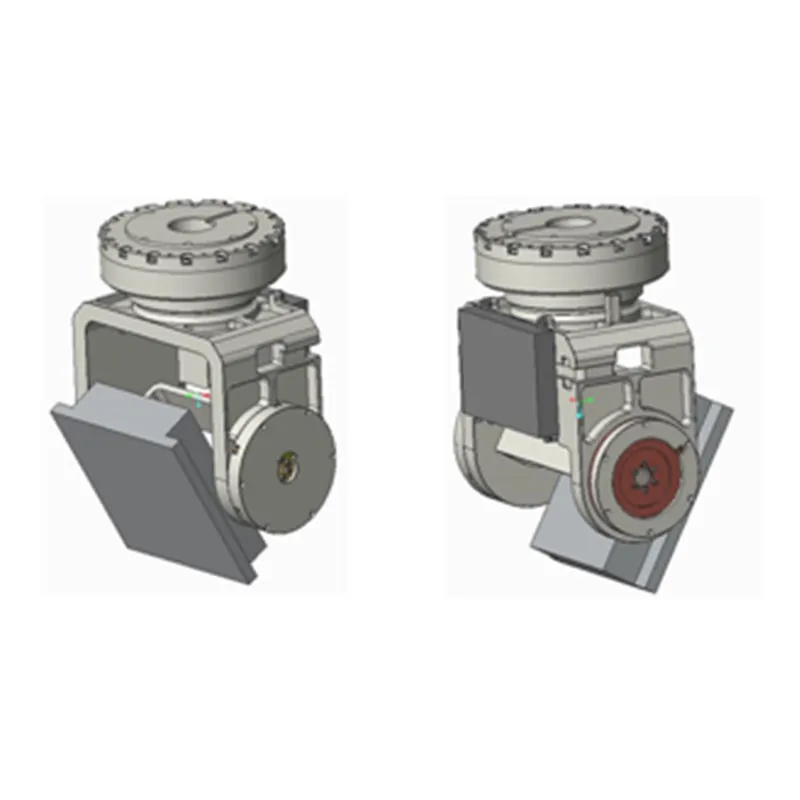
Когда мы в цеху говорим ?собрать стенд для гироскопа?, новички часто думают, что это про крепление прибора на платформу и подключение к компьютеру. На деле же, это история про создание управляемой среды. Основная задача — не просто ?прокрутить? датчик, а воспроизвести с высокой точностью те условия, в которых он будет работать в изделии, будь то ракета или стабилизатор камеры. И вот здесь начинается самое интересное — а что считать ?условиями?? Часто заказчик даёт ТЗ, написанное под идеальный вакуум, а реальные эксплуатационные нагрузки и помехи оказываются совсем другими.
Я помню, как мы работали над калибровкой MEMS-гироскопа для одного навигационного модуля. Стенд был собран по всем канонам: виброизолированная платформа, прецизионный поворотный стол, дорогая система сбора данных. Все тесты в статике проходили на ?отлично?. А когда модуль встроили в устройство и начали полевые испытания, появилась дрейфовая ошибка, которой по документам быть не должно было. Оказалось, стенд не учитывал влияние переменного магнитного поля от соседнего силового блока устройства — эффект, который в ?стерильных? условиях лаборатории просто не проявлялся.
Отсюда и мой главный вывод: стенд должен не столько проверять паспортные параметры, сколько моделировать наихудший, но реалистичный сценарий работы. Иногда для этого приходится намеренно вносить контролируемые помехи — например, тот же перепад температур или электрические наводки. Без этого данные с гироскоп стендов рискуют остаться просто красивыми графиками, далёкими от реальности.
Оборудование и ?подводные камни?
Какое оборудование лежит в основе? Чаще всего это прецизионный поворотный стол с сервоприводом, система оптической или лазерной обратной связи для контроля угла, и, конечно, термокамера. Казалось бы, всё стандартно. Но дьявол, как всегда, в деталях. Например, тот же поворотный стол. Его паспортная точность может быть 0.001 градуса, но это значение справедливо только для определённого диапазона скоростей и температур. Начинаешь гонять гироскоп в режиме резких угловых манёвров — и появляется гистерезис, про который в документации к столу может быть лишь мелкая сноска.
Ещё один частый источник головной боли — крепление. Жёсткое соединение гироскопа со стендом через переходную плиту может само по себе вносить механические напряжения в корпус чувствительного элемента, особенно для миниатюрных MEMS-приборов. Приходится экспериментировать с демпфирующими прокладками, разными схемами прижима. Иногда оптимальным оказывается решение, которое выглядит совсем не ?по-книжному? — например, использование специального быстротвердеющего полимера для юстировки вместо стандартных винтов.
Система сбора данных — отдельная песня. Важно не просто снимать сигнал с аналогового выхода или по SPI, а синхронизировать его с точной временной меткой от стенда и параллельно записывать данные с термопар и датчиков вибрации. Часто проблемы начинаются при анализе: фазовый сдвиг между каналами, разные частоты дискретизации. Порой проще написать свой софт для первичной обработки на Python, чем пытаться настроить готовый LabVIEW-проект под конкретную задачу.
Кейс из практики: интеграция и неочевидные зависимости
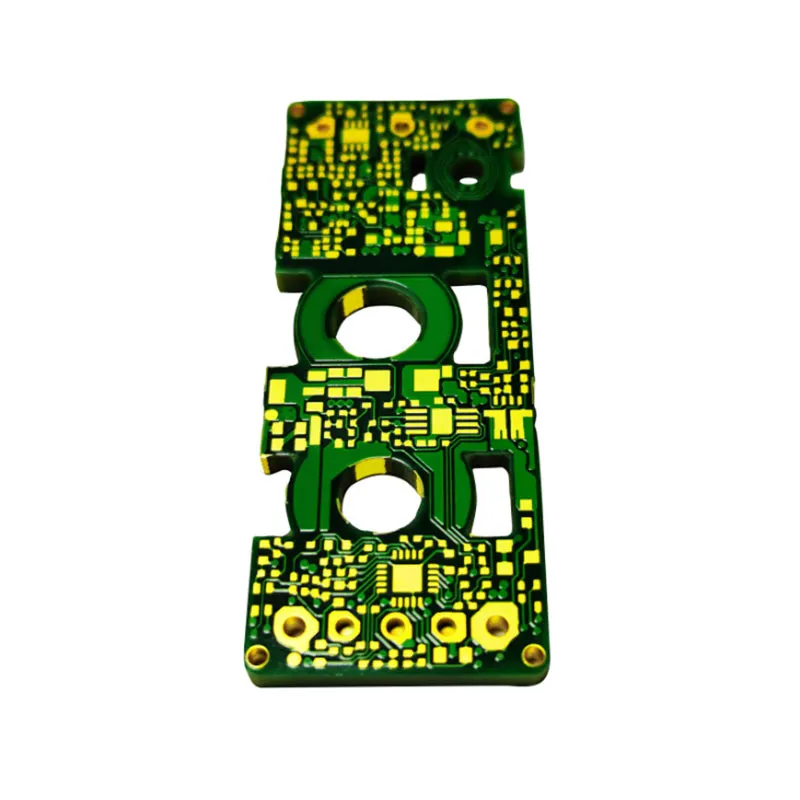
Хочу привести пример из недавнего проекта, где мы сотрудничали с компанией ООО Сиань Циюнь Чжисюнь Электронные Технологии. Они выступали как поставщик печатных плат и части электронной обвязки для блока, в который встраивался наш гироскоп. Их сайт, apexpcb-cn.ru, хорошо отражает их специализацию — инновации и интеграция в области электронных схем. Изначально задача казалась простой: провести валидацию гироскопа на нашем стенде, а потом отдать платы для сборки прототипа.
Но в процессе выяснилась важная деталь. Трассировка силовых линий на многослойной плате, предоставленной ООО Сиань Циюнь Чжисюнь Электронные Технологии, хотя и была выполнена безупречно с точки зрения целостности сигнала, создавала слабое, но постоянное магнитное поле в области установки гироскопа. На стенде, при тестировании ?голого? датчика, этот эффект не отслеживался. Проблему обнаружили только на этапе сборки прототипа, когда гироскоп был распаян на плату.
Пришлось оперативно вносить коррективы: мы совместно с их инженерами доработали разводку земли и добавили экранирующий слой в конкретной области платы. Это, в свою очередь, потребовало новых циклов испытаний на гироскоп стендов, но уже с макетом конечной платы, закреплённой рядом. Этот случай лишний раз показал, что стендовые испытания компонента в отрыве от его конечного окружения часто имеют ограниченную ценность. Нужно как можно раньше переходить к испытаниям в составе модуля или макета конечного изделия.
Ошибки, которых стоило бы избежать
Не всё, конечно, было гладко. Были и откровенные провалы. Один из самых показательных — попытка сэкономить на системе термостабилизации. Для серии бюджетных гироскопов мы решили использовать недорогую термокамеру с ПИД-регулятором. В спецификациях было заявлено поддержание температуры с точностью ±0.5°C. Этого, в теории, должно было хватить.
На практике же выяснилось, что скорость изменения температуры у этой камеры была невысокой, а главное — был значительный градиент температуры по объёму рабочей зоны. Гироскоп, установленный в центре, и гироскоп, установленный у стенки, находились в условиях, отличающихся на 1.5-2 градуса. Это сводило на нет всю калибровку по температурному коэффициенту. Пришлось признать ошибку, останавливать проект и заказывать камеру другого класса. Урок был прост: на системах создания и контроля среды экономить нельзя. Их погрешности напрямую становятся погрешностями ваших измерений.
Другая частая ошибка — пренебрежение метрологической поверкой самого стенда. Поворотные столы, датчики угла, измерительные цепи — всё это имеет свой межповерочный интервал. Кажется, что стол ?крутит как раньше?, но без регулярной поверки и калибровки эта уверность не имеет под собой оснований. Особенно это критично после транспортировки стенда или любых ремонтных работ.
Взгляд в будущее: что меняется в подходах
Сейчас всё больше говорят о цифровых двойниках и виртуальных испытаниях. Мне кажется, это направление неизбежно будет развиваться, но полностью заменить физический гироскоп стендов в обозримом будущем не сможет. Модель всегда будет упрощением, и какие-то нелинейные эффекты, шумы, cross-coupling помехи можно адекватно оценить только ?в железе?.
Однако, синергия возможна. Например, можно использовать предварительное математическое моделирование, чтобы определить самые критические режимы работы, а затем целенаправленно и точечно проверять их на реальном стенде. Это экономит время и ресурсы. Компании, которые, как ООО Сиань Циюнь Чжисюнь Электронные Технологии, работают над интеграцией электронных систем, могли бы выиграть, предоставляя не просто платы, а цифровые модели их паразитных параметров (индуктивности дорожек, ёмкостные связи) для таких виртуальных испытаний.
Ещё один тренд — это миниатюризация и удешевление самих стендов для задач массового производства. Не для разработки высокоточной аэрокосмической техники, а для входящего контроля партий MEMS-гироскопов на конвейере. Здесь важна скорость и надёжность, а не предельная точность. Вижу здесь потенциал для более тесной интеграции производителей компонентов, сборщиков и разработчиков испытательного оборудования.
В конечном счёте, ценность любого гироскоп стендов определяется не стоимостью его компонентов, а тем, насколько данные, полученные на нём, приближают нас к пониманию того, как поведёт себя устройство в реальном, неидеальном мире. И это всегда баланс между глубиной исследования, сроками и бюджетом. Идеального стенда не существует, но есть постоянный процесс его адаптации под новые задачи и новые, всё более коварные, реалии эксплуатации.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 47DR_RTSD2503
47DR_RTSD2503 -
 AI-будильник
AI-будильник -
 PAM Jump Host
PAM Jump Host -
 4T32R голографическая статическая РЛС
4T32R голографическая статическая РЛС -
 47DR_8T8R_GCO_V1
47DR_8T8R_GCO_V1 -
 Бортовая РЛС Ka-диапазона
Бортовая РЛС Ka-диапазона -
 Производство и обработка PCB и SMT
Производство и обработка PCB и SMT -
 Обучение разработке на ПЛИС (FPGA)
Обучение разработке на ПЛИС (FPGA) -
 PCB-проектирование и структурный дизайн
PCB-проектирование и структурный дизайн -
 32-канальное программно-определяемое радио NLY-49DR_SV4
32-канальное программно-определяемое радио NLY-49DR_SV4 -
 Высокоточная система синхронизации импульсов (YM_SYNC)
Высокоточная система синхронизации импульсов (YM_SYNC) -
 Программно-определяемое радио 4xAD9361
Программно-определяемое радио 4xAD9361