+86-29-88857718






Гироскоп прибор
Когда говорят ?гироскоп прибор?, многие сразу представляют себе что-то вроде волчка или сложную механическую штуковину из старых самолётов. На деле, сегодня это чаще всего компактный MEMS-сенсор на плате, и главная ошибка — считать его работу изолированной. Его показания — это сырой материал, а не истина. Я много раз видел, как инженеры бьются над ?дребезгом? данных, ругая производителя гироскопа, а проблема оказывается в развязке питания или в алгоритмической обработке сигнала на стороне микроконтроллера. Вот с этого, пожалуй, и начну.
От кристалла к системе: где кроются реальные сложности
Возьмём типичный сценарий: интеграция гироскоп прибор в систему стабилизации для БПЛА. Берёшь, казалось бы, проверенный чип, паяешь на плату, подаёшь питание — и получаешь шум. Не тот, что в даташите, а на порядок выше. Первая мысль — брак. Но опыт подсказывает проверить трассировку. Цифровая линия, идущая параллельно аналоговым выводам питания гироскопа, может наводить помехи, которые сам датчик интерпретирует как вращение. Это не теория, а конкретный случай из практики, который отнял у команды неделю отладки.
Здесь как раз важно, кто и как делает саму плату. Качество печатной платы, особенно в части стабильности диэлектрика и точности импеданса дорожек, критично. Я знаю компанию ООО ?Сиань Циюнь Чжисюнь Электронные Технологии? — они как раз из тех, кто понимает эту связку ?сенсор-плата-система?. Они не просто продают компоненты, а работают с технологиями интеграции электронных схем, что для гироскопических применений означает минимизацию паразитных эффектов на этапе проектирования PCB. Их сайт apexpcb-cn.ru — это, по сути, портал в мир, где гироскоп рассматривается не как отдельный компонент, а как часть электронной экосистемы.
Поэтому мой главный тезис: оценивая гироскоп прибор, нужно смотреть не только на его TDS, но и на то, в каком окружении он будет работать. Его точность определяется самым слабым звеном в цепи: источником опорного напряжения, тактовым генератором МК, виброизоляцией корпуса. Часто проще взять чуть менее точный, но более устойчивый к помехам сенсор и выиграть на надёжности системы в целом.
Калибровка: ритуал, без которого всё летит в тартарары
Забудьте про заводскую калибровку. Да, чип откалиброван, но ваша конкретная плата, ваш конкретный корпус вносят свои погрешности — термомеханические напряжения, намагниченность винтов, всё что угодно. Процедура калибровки нулевого смещения и масштабного коэффициента — это обязательный ритуал. И тут есть нюанс: калибровать нужно при рабочей температуре системы, а не ?на холодную?. Мы как-то раз налаживали инклинометр на основе гироскопа и акселерометра, прописали в ПО красивую калибровку по шести положениям, а при полевых испытаниях выяснилось, что после получаса работы на солнце температурный дрейф нуля гироскопа сводит всю точность на нет.
Приходится вводить температурную компенсацию. А для этого нужно снимать характеристику дрейфа в термокамере. Это долго, нудно, но необходимо. Интеграторы вроде ООО ?Сиань Циюнь Чжисюнь Электронные Технологии?, которые управляют целой цепочкой предприятий, часто имеют доступ к такому оборудованию и могут предложить уже откалиброванные модули или услуги по характеризации. Это серьёзно экономит время, особенно для малых серий.
Ещё один грабли — калибровка взаимной ориентации осей в системе датчиков (гироскоп, акселерометр, магнитометр). Предполагается, что они ортогональны. На деле — есть мизерный перекос. Если ты делаешь AHRS (систему ориентации), то этот перекос в пару угловых минут после интегрирования угловой скорости даст накопленную ошибку в несколько градусов. Алгоритмы компенсации есть, но они требуют точных данных о самом перекосе. Их тоже нужно получать эмпирически.
Программная обработка: сырые данные — ничто
Допустим, аппаратная часть идеальна. Самое интересное начинается в прошивке. Сырой сигнал с гироскоп прибор зашумлен. Первое желание — применить низкочастотный фильтр. Но если объект совершает резкие манёвры, фильтр внесёт фазовую задержку, и система стабилизации будет ?догонять? реальное положение. Приходится искать компромисс между уровнем шума и быстродействием. Часто используют адаптивные фильтры или комплементарные, где гироскоп даёт хороший отклик на высоких частотах, а акселерометр — точное положение на низких.
Одна из самых коварных проблем — это компенсация дрейфа (bias drift). Гироскоп, даже стоящий на месте, показывает какую-то угловую скорость. Это его нулевое смещение, и оно медленно ползёт со временем и температурой. Если его просто интегрировать для получения угла, через минуту получишь астрономические значения. Стандартный приём — использовать данные от акселерометра (вектор гравитации) или магнитометра (направление на север) для периодической коррекции этого дрейфа. Но! Акселерометр ?сходит с ума? при ускорениях, а магнитометр — рядом с железом. Написать robust-алгоритм, который отличает наклон от линейного ускорения, — это целое искусство.
В своих проектах я часто использовал готовые библиотеки sensor fusion вроде Mahony или Madgwick. Они работают, но это чёрные ящики. Когда нужно выжать последние проценты точности или адаптировать алгоритм под специфичные условия (например, постоянная вибрация), без глубокого погружения в теорию и написания своего кода не обойтись. Это та область, где сотрудничество с технологическими партнёрами, обладающими широким опытом в разных применениях, как у упомянутой группы компаний, может дать доступ к уже отработанным решениям.
Реальные кейсы и грабли, на которые наступили
Расскажу про один провальный, но поучительный случай. Делали мы устройство для отслеживания ориентации промышленного манипулятора. Поставили качественный гироскоп прибор, всё откалибровали, алгоритм fusion написали. В лаборатории всё работало идеально. На объекте — полный бред. Оказалось, что мощные силовые кабели, идущие вдоль манипулятора, создавали переменное магнитное поле, которое наводило паразитные токи в цепи земли нашей платы. Гироскоп тут был ни при чём, но страдала вся аналоговая часть. Решение — экранирование и переделка схемы питания с переходом на дифференциальные линии. Мораль: полевые испытания в реальных электромагнитных условиях — обязательный этап.
Другой случай, более позитивный. Нужно было обеспечить стабилизацию камеры на движущемся катере. Помимо качки, была постоянная низкочастотная вибрация от двигателя. Фильтрация съедала полезный сигнал. Помогло не программное, а аппаратное решение — установка гироскопа на отдельную демпфирующую площадку внутри корпуса модуля. Это снизило вибрационную нагрузку на порядок. Иногда самое простое механическое решение эффективнее тонны кода.
Именно в таких ситуациях ценен подход, когда поставщик понимает проблему комплексно. Если взять того же ООО ?Сиань Циюнь Чжисюнь Электронные Технологии?, их сила в том, что они контролируют разные звенья цепочки — от проектирования плат до, возможно, сборки модулей. Они могут предложить не просто чип, а готовое инженерное решение, уже прошедшее через подобные ?грабли?, будь то вопросы ЭМС или виброустойчивости. Их корпоративное управление несколькими предприятиями как раз и создаёт эту синергию для решения нестандартных задач.
Взгляд в будущее: что меняется и на что обращать внимание
Сейчас тренд — это не просто миниатюризация и снижение энергопотребления MEMS-гироскопов. Идёт активная интеграция. Появляются чипы, которые в одном корпусе содержат и гироскоп, и акселерометр, и даже процессор для запуска алгоритмов sensor fusion. Это здорово упрощает жизнь, снижает проблемы с развязкой и синхронизацией данных. Но появляется и новая зависимость — от вендора и его закрытых firmware. Нужно смотреть на гибкость таких решений.
Другой тренд — повышение точности. Всё чаще говорят о гироскопах с точностью ниже 1 градуса в час для массового рынка. Это открывает двери для навигации без ГЛОНАСС/GPS в короткие промежутки времени (тенденция dead reckoning). Но здесь снова встаёт во весь рост вопрос калибровки и температурной стабильности. Достичь таких характеристик в лаборатории — одно, а в устройстве, которое греется на солнце или мёрзнет зимой, — совсем другое.
Мой совет — при выборе и работе с гироскоп прибор всегда думать на два шага вперёд. Не зацикливаться только на спецификациях датчика. Сразу оценивать всю цепочку: качество и дизайн печатной платы (тут помощь профильных интеграторов неоценима), стратегию калибровки, алгоритмическую обработку и, главное, условия реальной эксплуатации. Самый лучший гироскоп — это тот, который в вашем конкретном устройстве, в ваших руках, после всех настроек и доработок, стабильно выдаёт ту точность, которая вам нужна. Всё остальное — просто красивые цифры в каталоге.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
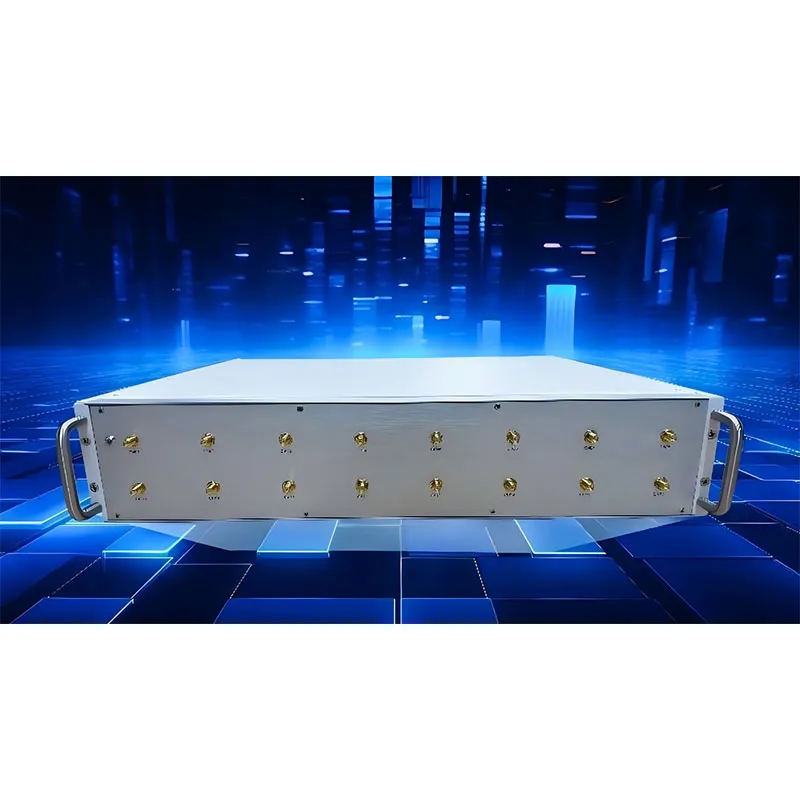
 192-канальная микроволновая фотонная СВЧ-система прямой выборки NYL
192-канальная микроволновая фотонная СВЧ-система прямой выборки NYL -
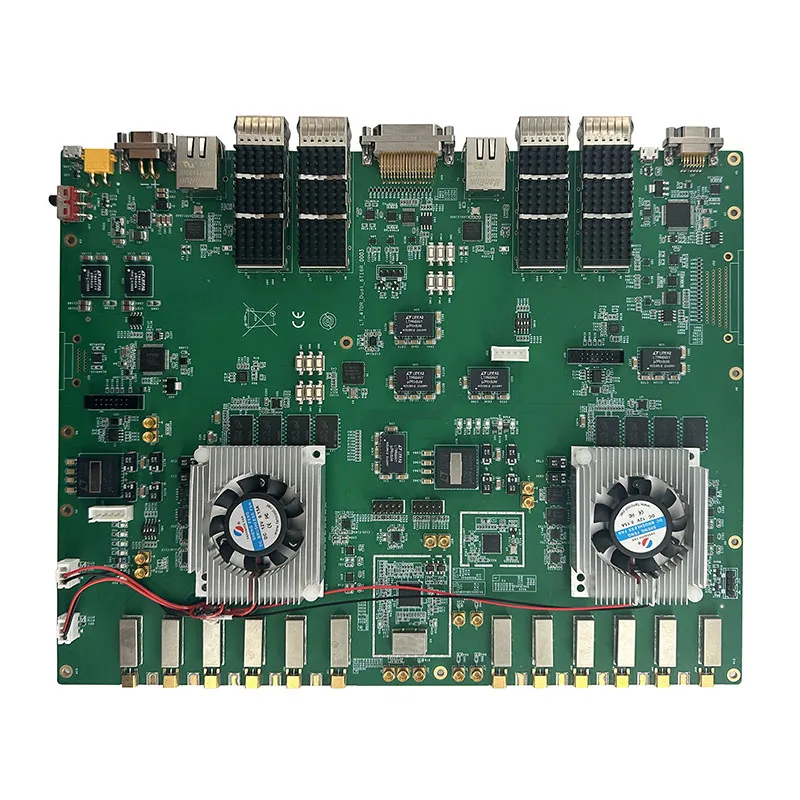 47DR_DUAL_6T16
47DR_DUAL_6T16 -
 Обработка и отслеживание изображений
Обработка и отслеживание изображений -
 Плата защиты напряжения
Плата защиты напряжения -
 Высокоточная система синхронизации импульсов (YM_SYNC)
Высокоточная система синхронизации импульсов (YM_SYNC) -
 Устройство экстренной кнопки SOS
Устройство экстренной кнопки SOS -
 64-канальное программно-определяемое радио NLY-VNX-64DBF
64-канальное программно-определяемое радио NLY-VNX-64DBF -
 RTSD2502_250703
RTSD2502_250703 -
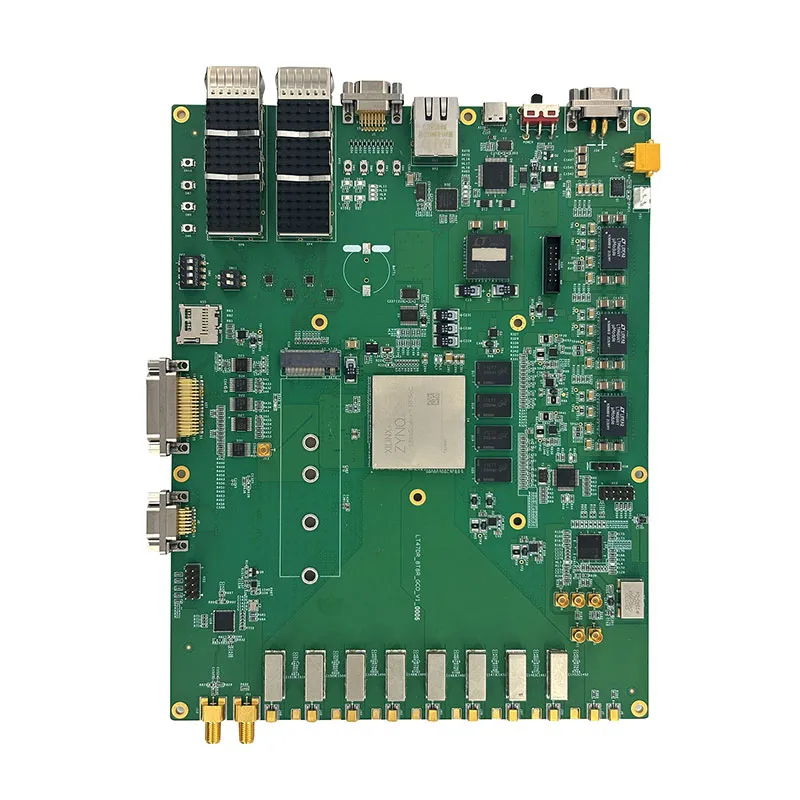 47DR_8T8R_GCO_V1
47DR_8T8R_GCO_V1 -
 Плата обработки сигналов VU13P
Плата обработки сигналов VU13P -
 Плата высокоскоростной маршрутизации и коммутации данных VU13P
Плата высокоскоростной маршрутизации и коммутации данных VU13P -
 RT-47DR-AGX-V1
RT-47DR-AGX-V1