+86-29-88857718






Гироскоп консоль
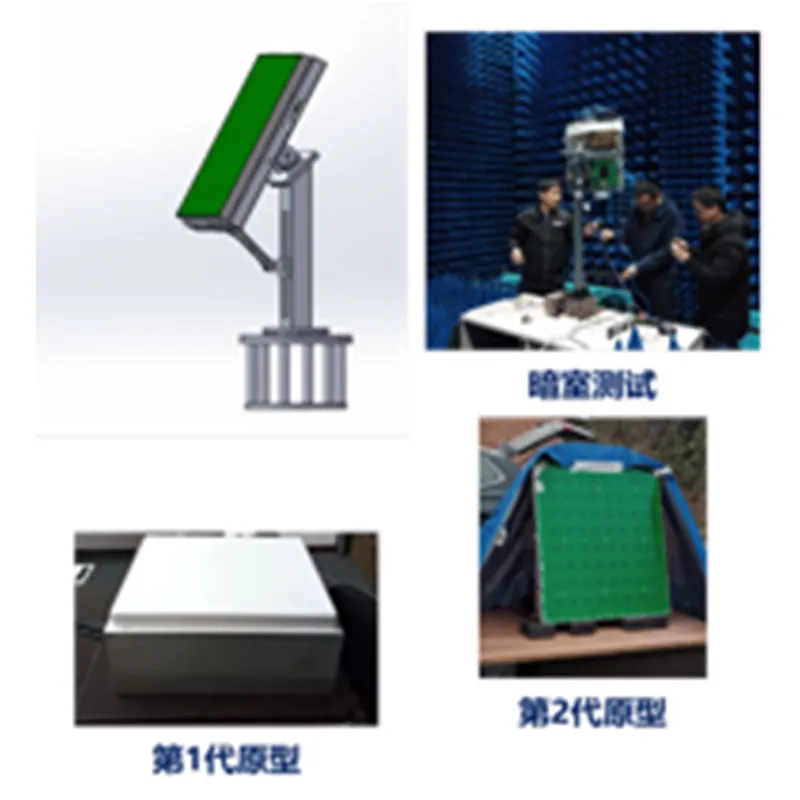
Когда говорят 'гироскоп консоль', многие сразу представляют себе готовый модуль в красивом корпусе, который осталось только подключить. На практике же — это чаще головная боль с интеграцией, калибровкой и борьбой с дрейфом. Сам термин в нашей среде может означать и саму платформу с установленным гироскопом, и систему стабилизации на её основе, что уже создаёт путаницу в ТЗ.
Конструктивные особенности и типичные заблуждения
Основная ошибка — считать, что ключевая характеристика это только точность гироскопа в datasheet. На деле, для консоли критична жесткость крепления всего узла. Вибрации от собственных двигателей или внешние удары могут вносить погрешности, которые софтом не отфильтруешь. Помню случай, когда для одного проекта взяли отличный MEMS-гироскоп, но сэкономили на виброизоляции кронштейна. В статике всё работало идеально, а при работе в полевых условиях на технике появлялись артефакты, которые сначала списали на алгоритм.
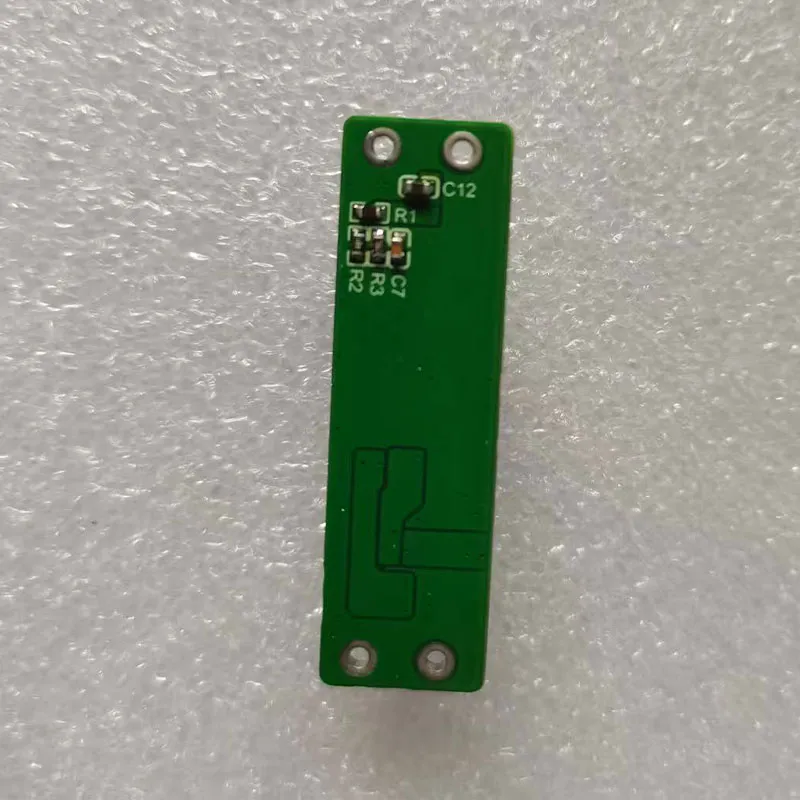
Ещё один момент — разводка платы. Сигнал с гироскопа очень чувствителен к наводкам, особенно если на той же консоли есть силовые драйверы. Нужно тщательно разделять землю, иногда даже идти на многослойную плату с выделенным слоем. Просто развести дорожки 'как получилось' — гарантия проблем с шумами. У нас был прототип, где из-за такой ошибки пришлось полностью перезаказывать партию печатных плат, что задержало выход продукта на три месяца.
И третий, часто упускаемый из виду аспект — температурный режим. Гироскоп консоль может греться как от окружающей среды, так и от соседних компонентов. Смещение нуля (bias) сильно зависит от температуры. Если в системе нет термокомпенсации или хотя бы мониторинга температуры датчика, точность в разных условиях эксплуатации будет плясать. Просто заложить в алгоритм типовой коэффициент из мануала — недостаточно, нужны калибровки на горячую и на холодную.
Опыт интеграции и взаимодействие с производителями компонентов
Работая над стабилизацией для оптических систем, мы плотно сотрудничали с несколькими поставщиками. Важно не просто купить гироскоп, а получить от техподдержки детальные аппноуты по его работе в составе именно консоли. Например, некоторые модели требуют специфической последовательности инициализации, и если её нарушить, дрейф увеличивается в разы. Один раз мы потратили неделю на отладку, пока не получили от инженеров производителя закрытый меморандум с уточнениями, которого не было в публичной документации.
Что касается отечественных решений, то ситуация постепенно меняется. Раньше часто приходилось использовать импортные сенсоры, но сейчас появляются интересные разработки и здесь. Ключевое — проверять не на столе, а в условиях, приближенных к реальным. Например, как ведёт себя консоль после длительного хранения на морозе и последующего включения. Тут не обойтись без собственного испытательного стенда.
В этом контексте полезно смотреть на компании, которые занимаются комплексными решениями в электронике. Вот, к примеру, ООО 'Сиань Циюнь Чжисюнь Электронные Технологии' (сайт: apexpcb-cn.ru). Они, как я понимаю, с 2018 года развивают именно интеграцию электронных схем. Для разработчика гироскоп консоли важно, чтобы был не просто поставщик деталей, а партнёр, способный помочь с проектированием платы или даже сборкой готового узла. Их подход к созданию экосистемы через управление несколькими предприятиями в цепочке как раз на это намекает — можно ожидать более глубокой экспертизы на стыке технологий.
Программная часть и калибровка
Алгоритмы фильтрации — это отдельная песня. Стандартные библиотеки типа Mahony или Madgwick работают хорошо, но их нужно точно 'привязать' к своей аппаратной части. Параметр, определяющий доверие к гироскопу относительно акселерометра, подбирается экспериментально. Иногда кажется, что всё настроено, а потом при определённом характере движения консоли возникает расхождение.
Калибровка — это обязательный и самый нудный этап. Нужно не только компенсировать смещение нуля, но и масштабные коэффициенты по осям. Идеально, если в консоль заложен автоматический процесс калибровки, который запускает оператор нажатием одной кнопки, повращав устройство в пространстве. Но для этого нужна запасная память для коэффициентов и чёткая логика в прошивке. Мы в одном из проектов реализовали такую систему, что значительно упростило жизнь сборщикам на производстве.
Частая проблема — несовпадение системы координат гироскопа и системы координат всей консоли. Датчик может быть установлен с поворотом на 90 градусов, и если это не учесть в коде, то стабилизация будет работать в неправильной плоскости. Казалось бы, мелочь, но на поиск такой ошибки уходят часы отладки. Всегда нужно делать схему ориентации компонентов на плате и привязывать её к коду.
Практические кейсы и 'грабли'
Был у нас проект по созданию поворотной платформы для камеры наблюдения. Использовали двухосевую гироскоп консоль. Всё шло хорошо, пока не начали тесты на длительное слежение за объектом. Обнаружили, что через 20-30 минут работы накапливается ошибка, и камера потихоньку 'уплывает'. Оказалось, что в гироскопе был включён встроенный фильтр низких частот с довольно большой постоянной времени, который мы изначально сочли полезным. Он-то и вносил фазовый сдвиг, который при интеграции угловой скорости давал нарастающую ошибку. Отключили фильтр и стали подавлять высокочастотный шум своим алгоритмом — проблема ушла.
Другой случай связан с питанием. Гироскопы чувствительны к качеству напряжения питания. Если используется общий стабилизатор с силовыми элементами, в моменты их включения могут быть просадки или всплески. Это приводит к кратковременным сбоям в показаниях. Решение — отдельный LDO-стабилизатор исключительно для датчика. Мелочь, которая решает.
И ещё о мелочах: разъёмы. Казалось бы, что может быть проще? Но если консоль вибрирует, некачественный разъём может давать микрообрывы в контактах, что выглядит как случайные выбросы в данных. Пришлось переходить на разъёмы с фиксатором и контактами повышенной надёжности, хотя изначально в спецификации этого не было.
Взгляд в будущее и итоговые соображения
Сейчас тренд — это интеграция IMU (инерциальных измерительных модулей), где гироскоп, акселерометр и иногда магнитометр уже находятся в одном корпусе и откалиброваны на заводе. Это упрощает жизнь, но не отменяет необходимости грамотного монтажа этого модуля на саму консоль. Проблема механических напряжений и температур остаётся.
Также становится больше гироскопов с цифровыми интерфейсами типа SPI или I2C, которые проще в подключении, чем старые аналоговые с их АЦП. Но здесь нюанс в скорости обмена данными. Для быстродействующей консоли нужно обеспечить высокую частоту опроса, и это может конфликтовать с другими устройствами на шине. Приходится тщательно планировать архитектуру обмена.
В целом, создание надёжной гироскоп консоли — это всегда компромисс между точностью, стоимостью, сложностью и надёжностью. Нельзя просто взять самый точный датчик и считать дело сделанным. Нужно продумать всю цепочку: от механического крепления и схемотехники до алгоритмов фильтрации и пользовательской калибровки. И здесь как раз ценен опыт компаний, которые видят задачу комплексно, как та же ООО 'Сиань Циюнь Чжисюнь Электронные Технологии', работающая над созданием полной экосистемы. Их подход к управлению несколькими предприятиями в технологической цепочке потенциально позволяет контролировать качество на разных этапах — от проектирования схем до сборки, что для конечного разработчика может вылиться в меньшее количество скрытых проблем и более предсказуемый результат. Главное — не останавливаться на бумажных характеристиках, а тестировать, тестировать и ещё раз тестировать в условиях, максимально приближенных к боевым.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 RTSD2502_250703
RTSD2502_250703 -
 47DR_DUAL_6T16
47DR_DUAL_6T16 -
 47DR_4T4R_SCSZSF3
47DR_4T4R_SCSZSF3 -
 MEMS инерциальная навигационная система WT-INS-B01
MEMS инерциальная навигационная система WT-INS-B01 -
 Вычислительная мощность платы FPGA+TX2i GPU составляет 40 TOPS
Вычислительная мощность платы FPGA+TX2i GPU составляет 40 TOPS -
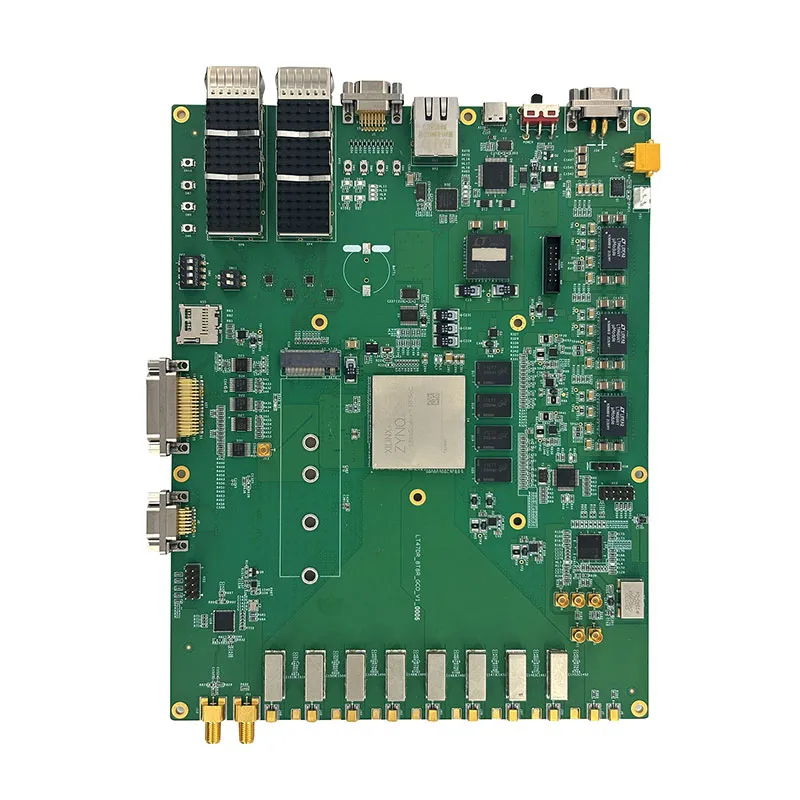
 Программно-определяемое радио 4xAD9361
Программно-определяемое радио 4xAD9361 -
 Разработка программного обеспечения
Разработка программного обеспечения -
 AI-будильник
AI-будильник -
 64-канальное программно-определяемое радио NLY-VNX-64DBF
64-канальное программно-определяемое радио NLY-VNX-64DBF -
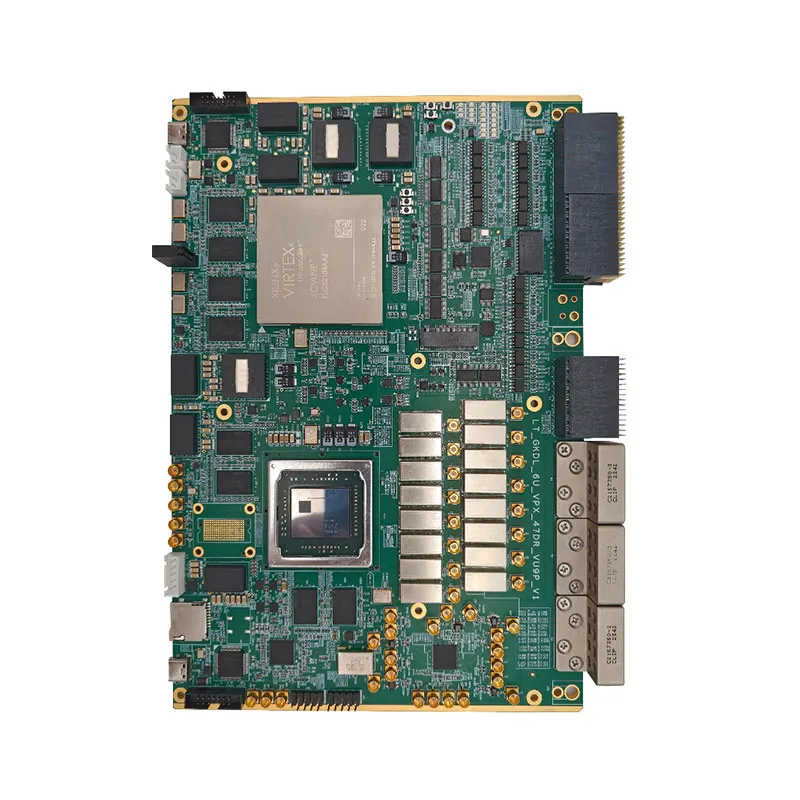
 28DRx3_VU13P_9T24R
28DRx3_VU13P_9T24R -
 Разработка аппаратного обеспечения
Разработка аппаратного обеспечения -
 16T16R прототип программируемой РЛС
16T16R прототип программируемой РЛС
Связанный поиск
Связанный поиск- Центр управления воздушным движением
- Высокоскоростной сбор и хранение данных
- Электронные компоненты волжский
- Простейшие электронные компоненты
- Плата обработки сигналов vu13p-fmc
- Производство электронных компонентов роботов
- Кнопка на печатной плате
- Технологии умного дома и интернета вещей
- Красная печатная плата
- Настройка печатной платы